
STAPL: Standard Template Adaptive Parallel Library
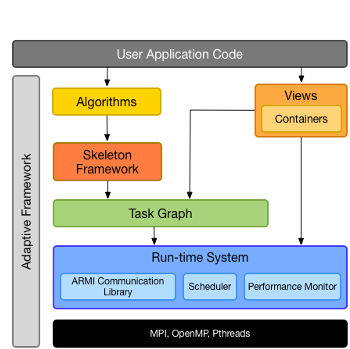
The Standard Template Adaptive Parallel Library is a framework for developing parallel programs in C++. It is designed to work on both shared and distributed memory parallel computers and its core is a library of ISO Standard C++ components with interfaces similar to the (sequential) ISO C++ standard library.
Robot Task and Motion Planning
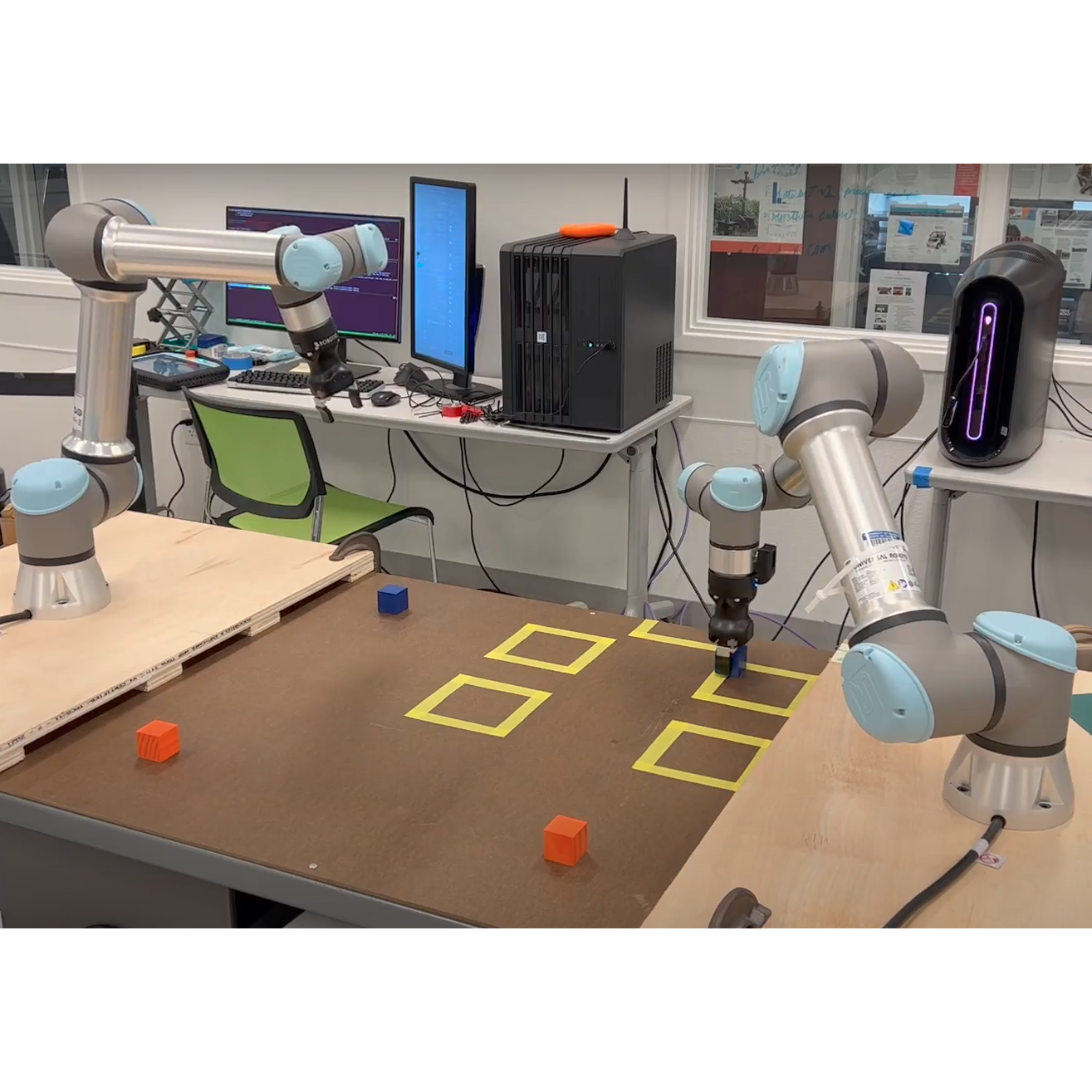
Motion planning has applications in robotics, games/virtual reality, computer-aided design/virtual prototyping, and bioinformatics. Our research is focused on developing motion planning algorithms and applying them to a wide range of problems.
Mind in Vitro: Computing with Living Neurons
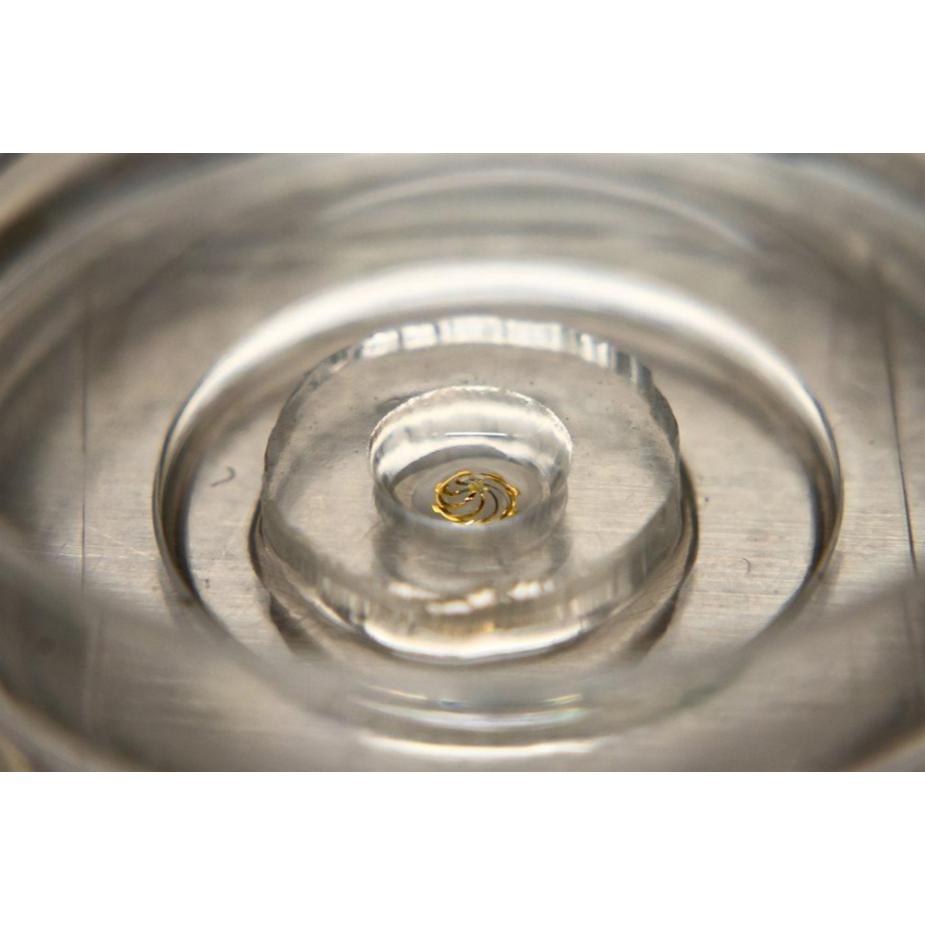
This NSF Expedition in Computing will develop the science and technology to fabricate, model and program systems based on living neurons. Interfacing with muscles and sensors, the behavior of these machines will evolve as they probe their environment, explore and respond to it.
Computational Biology
Our group is investigating applications of sampling-based motion planning methods to protein folding, ligand binding (i.e., drug docking, which arises in drug design), RNA folding, and neuroscience.
CEESD: Center for Exascale-enabled Scramjet Design
CEESD is developing physics-faithful predictive simulations enabled by advanced computer science methods to leverage massive-scale computational resources in order to advance scramjet designs that leverage advanced high-temperature composite materials.
Compiler Optimization
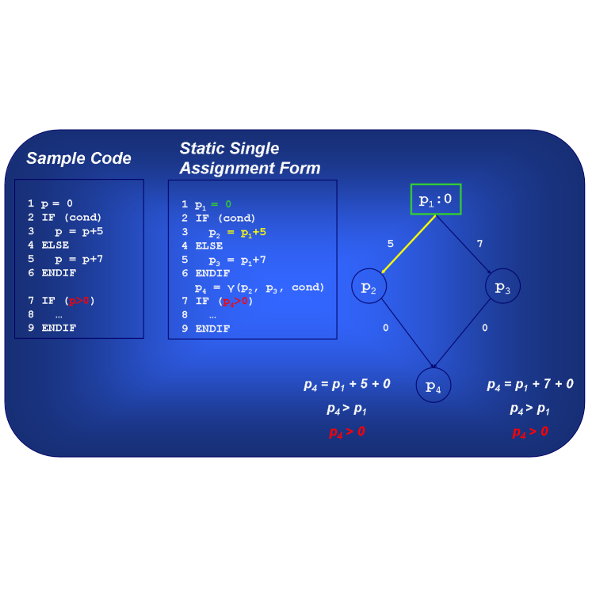
An automatable framework for run-time optimization to complement existing and future static compiler techniques.
Application-Centric Computing
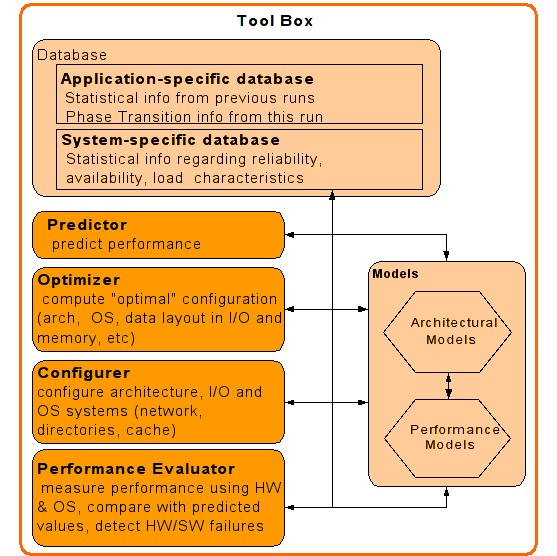
A framework for application-centric computing.
Computational Geometry

Computational geometry, the study of algorithms operating on geometric inputs, is widely used in motion planning and graphics. We develop novel CG algorithms for applications in robotics as well as algorithms of independednt interest.