Probabilistic Roadmap Methods (PRMs) are
widely used motion planning methods that sample robot
configurations (nodes) and connect them to form a graph
(roadmap) containing feasible trajectories. Many PRM variants
propose different strategies for each of the steps and choosing
among them is problem dependent. Planning in heterogeneous
environments and/or on parallel machines necessitates dividing
the problem into regions where these choices have to be made
for each one. Hand-selecting the best method for each region
becomes infeasible. In particular, there are many ways to select
connection candidates, and choosing the appropriate strategy
is input dependent.
In this work, we present a general connection framework
that adaptively selects a neighbor finding strategy from a
candidate set of options. Our framework learns which strategy
to use by examining their success rates and costs. It frees the
user of the burden of selecting the best strategy and allows the
selection to change over time.
We perform experiments on rigid bodies of varying geometry
and articulated linkages up to 37 degrees of freedom. Our
results show that strategy performance is indeed problem/region
dependent, and our adaptive method harnesses their strengths.
Over all problems studied, our method differs the least from
manual selection of the best method, and if one were to
manually select a single method across all problems, the
performance can be quite poor. Our method is able to adapt
to changing sampling density and learns different strategies for
each region when the problem is partitioned for parallelism.
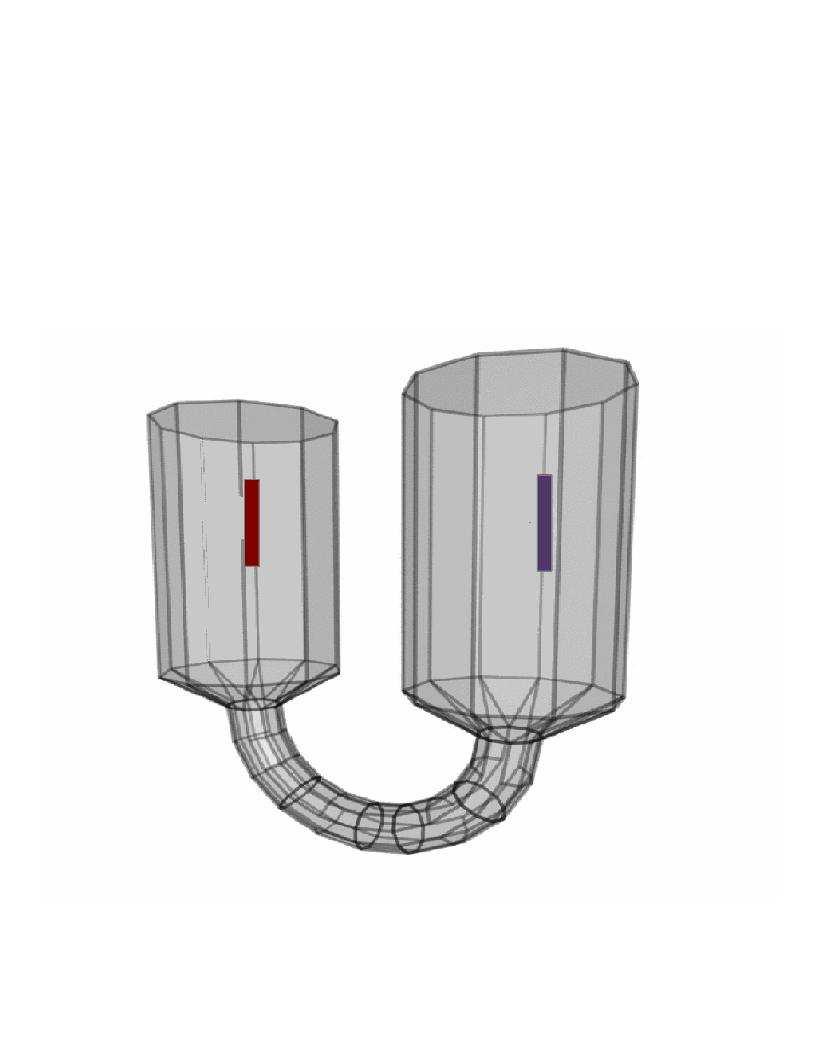
U-Tunnel Environment
|
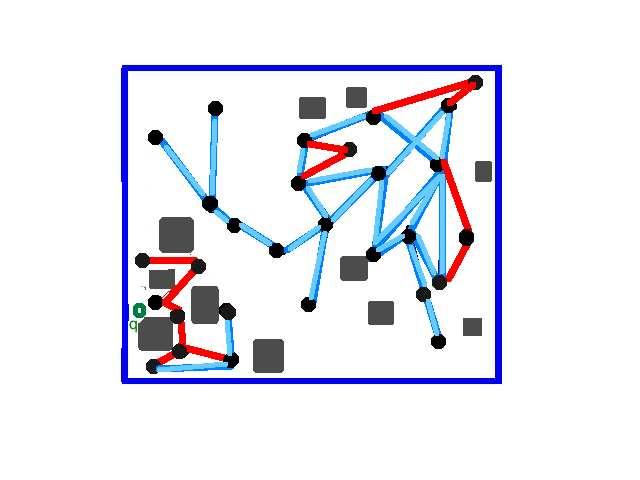
Maze Heterogenous Environment
|
The U-tunnel environment has a long rigid body robot
which behaves much differently than the compact robots in
the prior environments. Here, ANC performs significantly
better than the other methods in terms of running time and
roadmap size and near the best in terms of Edges/Nodes ratio.
Figure 3 provides the learning plot. Again, ANC is able to
adapt and learn a good connection strategy.
Learning Profile for a U-tunnel Environment
|
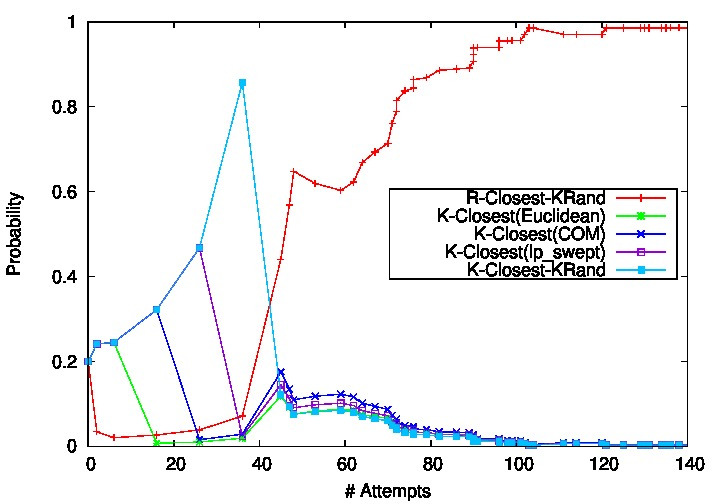
The maze environment result plots shows the probability that each connection method
is selected in the ANC framework over time for a single
representative run. Figure 2 shows that early on R-Closest,K-Rand(Euclidean) is selected. However, as
roadmap construction progresses, the success of this method begins to level out
and the probability of K-Closest,R-Rand(Euclidean) begins to increase and then levels off.
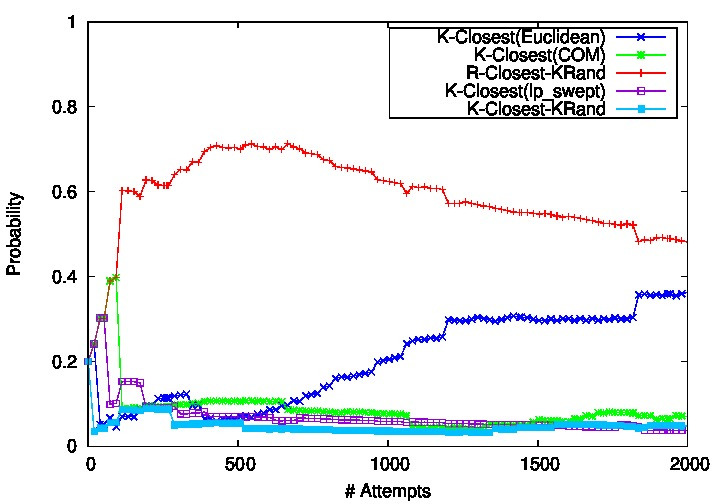
Learning Profile for a maze Environment
|
Probabilistic Roadmap Methods (PRMs) solve the
motion planing problem by constructing a roadmap (or graph)
that models the motion space when feasible local motions exist.
PRMs and variants contain several phases during roadmap
generation i.e., sampling, connection, and query. Some work
has been done to apply machine learning to the connection
phase to decide which variant to employ, but it uses a global
learning approach that is inefficient in heterogeneous situations.
We present an algorithm that instead uses local learning: it
only considers the performance history in the vicinity of the
current connection attempt and uses this information to select
good candidates for connection. It thus removes any need to
explicitly partition the environment which is burdensome and
typically difficult to do. Our results show that our method learns
and adapts in heterogeneous environments, including a KUKA
youBot with a fixed and mobile base. It finds solution paths
faster for single and multi-query scenarios and builds roadmaps
with better coverage and connectivity given a fixed amount of
time in a wide variety of input problems. In all cases, our
method outperforms the previous adaptive connection method
and is comparable or better than the best individual method.

Local learning region
|
Local learning scenario
|
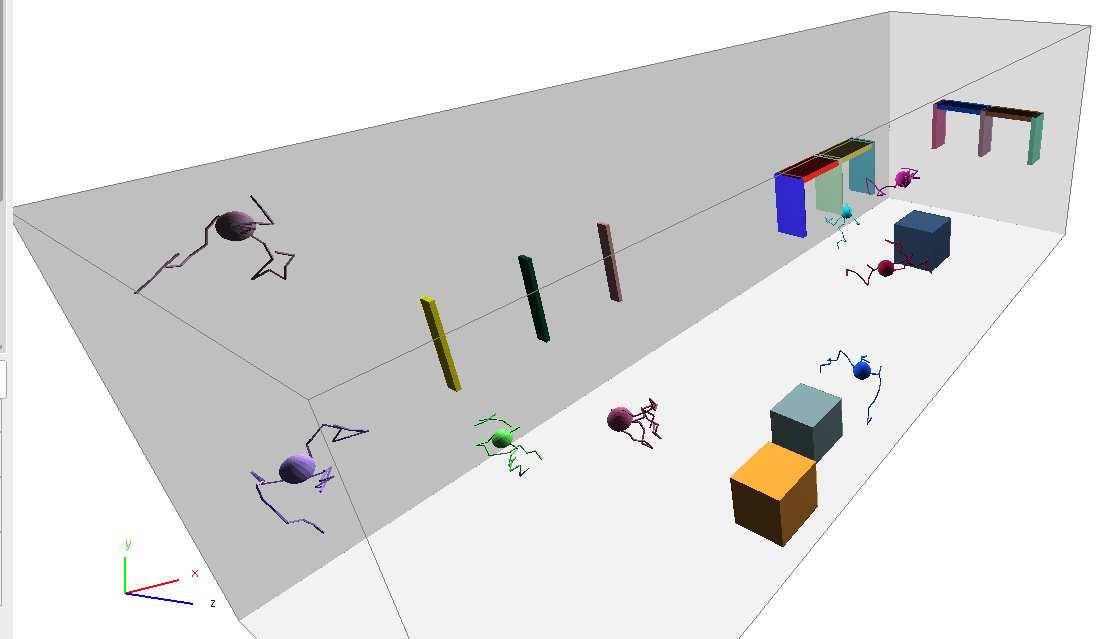
The 36 DOF JellyFish environment consist of a robot has three
articulated arms attached to a sphere where each arm has 10
links. The aim of this experiment is to see the performance
of ANC-Spatial on a highly articulated and complex robot.
Different types of obstacles are placed throughout the envi-
ronment. We again provide 8 query samples and count how
many possible queries can be solved. Roadmap construction
is allowed to take 1500 seconds.
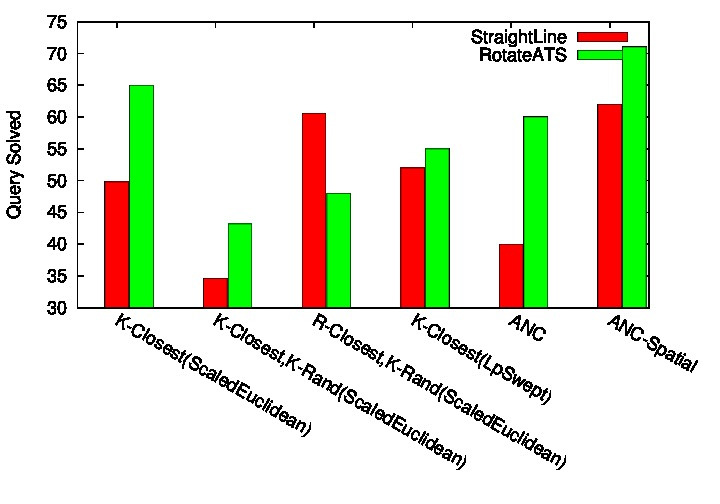
Figure 6 (bars in red) shows the percentage of queries
(6(a)) and the percentage of nodes in the largest connected
components (6(b)) using the StraightLine local planner for
each method. ANC-Spatial again solves the greatest percent-
age of queries with a higher percentage of its nodes in the
largest connected component. ANC-Spatial also outperforms
ANC in this articulated linkage environment. This environ-
ment is prone to bad partitioning choices because a bad
partitioning could easily form a narrow passage that cannot
be traversed by this highly articulated linkage. Thus it is even
more imperative that localized learning regions are dynamic.
Figure 6 (bars in green) shows results using the RotateATS
local planner. ANC-Spatial also outperforms the other methods in terms of percentage of queries solved. We also have
a good percentage of nodes in the largest connected com-
ponent. Even a large change in local planners (as evidenced
by changes in individual connection method performance)
results in small change in ANC-Spatial performance.
36 DOF JellyFish Environment
|
36 DOF JellyFish Time Results
|
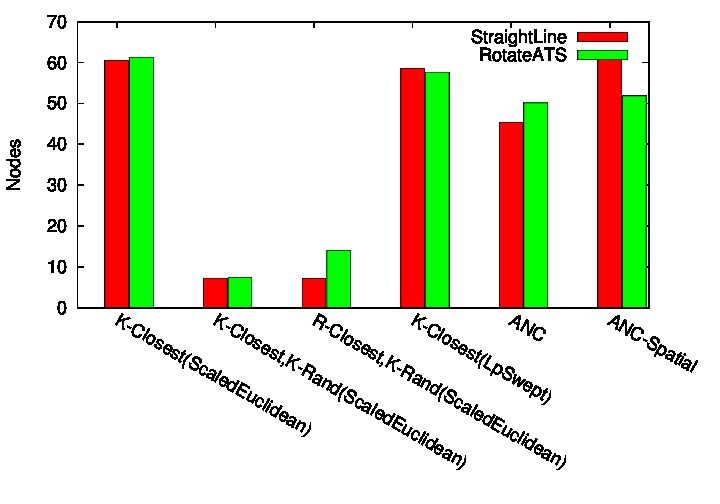
36 DOF JellyFish Node Results>
|
8 DOF KUKA youBot model with a mobile base:
Our image shows an 8 DOF KUKA youBot robot with a mobile base that must pass through doorways while navigating
around boxes in an industrial scene. The query requires the
robot to move through each room and reach into a cabinet.
Our results show the time needed solve the query with
different k values (5, 10, 15, 20) and the usage frequency
of each individual connection method. K-Closest(Scaled Eu-
clidean) and K-Closest(LpSwept) shows little change in the
time needed with respect to k. R-Closest,K-Rand(Scaled Eu-
clidean) is the best performing individual connection method.
ANC-Spatial performs comparably for the different k values.
We also gave ANC and ANC-Spatial a chance to learn
the appropriate k value by providing all instances of the
connection methods as input. These are denoted as ANC(all)
and ANC-Spatial(all) in Figure 8. ANC-Spatial(all) performs
comparable to the best connection methods in the list and is
still able to learn well when faced with different k values.
ANC, however, has difficulty handling the large number of
choices even though it utilizes the one of the best performing
individual methods.
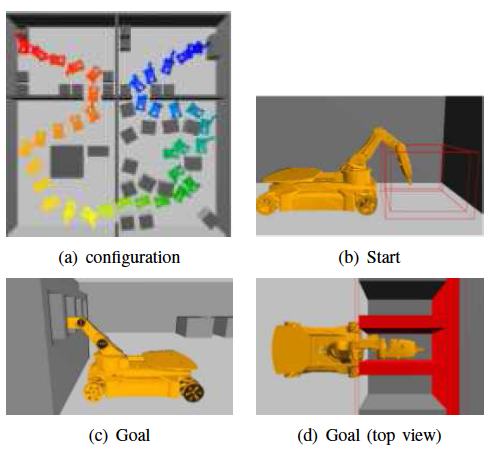
KukayouBot Environment
|
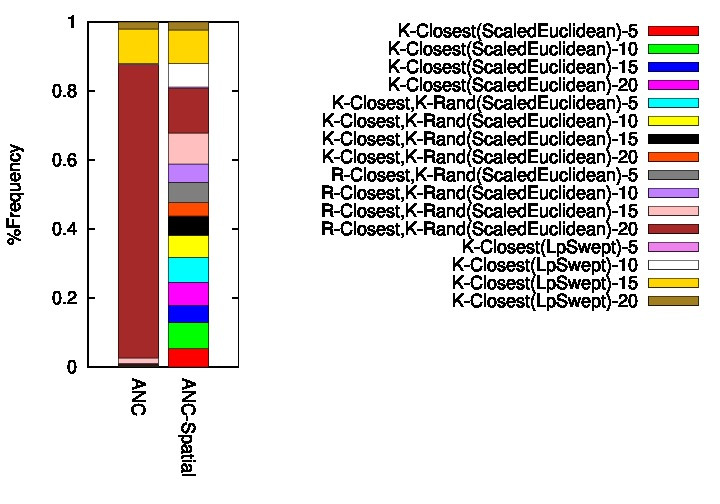
KukayouBot Frequency of Usage
|
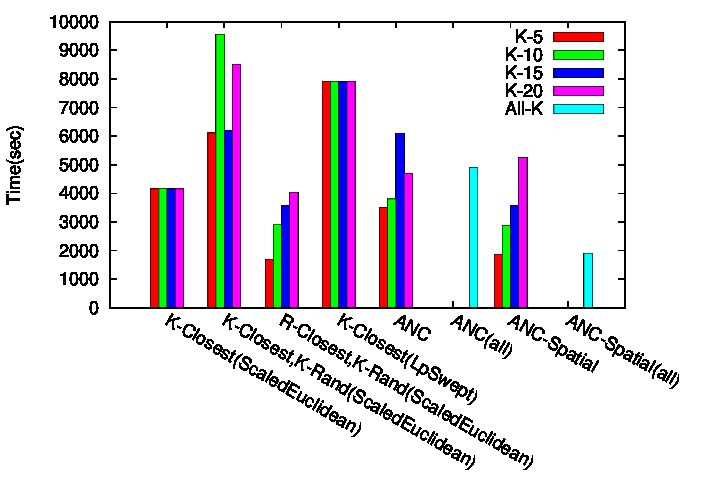
KukayouBot Time Results
|
Results shows the time needed solve the query with different k neighbor values (5, 10, 15, 20)
and the usage frequency of each individual connection method.
Scaled Euclidean and LpSwept shows little change in the time needed with respect to k.
Scaled Euclidean is the best performing individual connection method.
ANC-Spatial performs comparably for the different k values.
We also gave ANC and ANC-Spatial a chance to learn the appropriate k value by providing all instances of the connection methods as input.
These are denoted as ANC(all) and ANC-Spatial(all).
ANC-Spatial(all) performs comparable to the best connection methods in the list
and is still able to learn well when faced with different k values.
ANC, however, has difficulty handling the large number of choices
even though it utilizes the one of the best performing individual methods
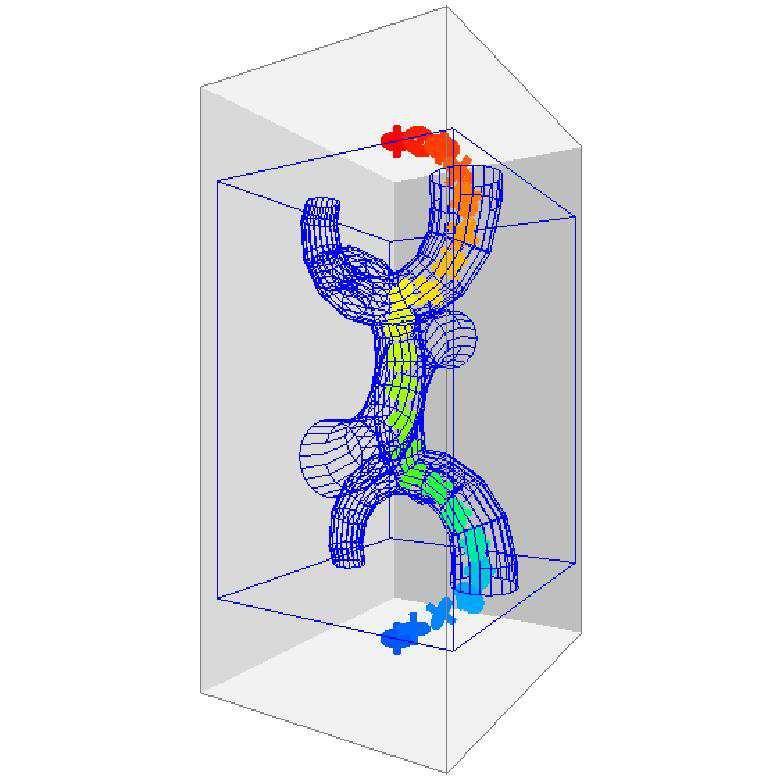
Simulating protein folding motions is
an important problem in computational biology. Motion planning
algorithms such as Probabilistic Roadmap Methods (PRMs) have
been successful in modeling the protein folding landscape. PRMs
and variants contain several phases (i.e., sampling, connection,
and path extraction). Global machine learning has been applied
to the connection phase but is inefficient in situations with varying
topology, such as those typical of folding landscapes.
Results: We present a local learning algorithm that considers
the past performance near the current connection attempt as
a basis for learning. It is sensitive not only to different types
of landscapes but also to differing regions in the landscape
itself, removing the need to explicitly partition the landscape.
We perform experiments on 23 proteins of varying secondary
structure makeup with 52–114 residues. Our method models the
landscape with better quality and comparable time to the best
performing individual method and to global learning.
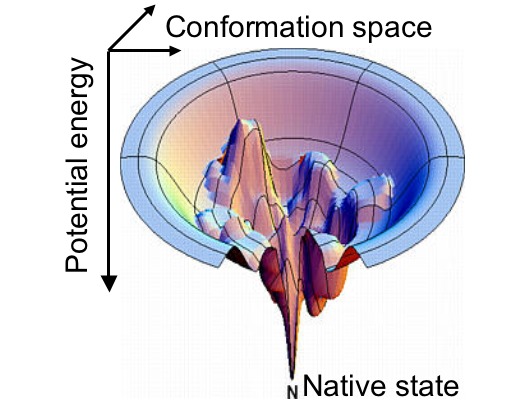
Folding Landscape
|
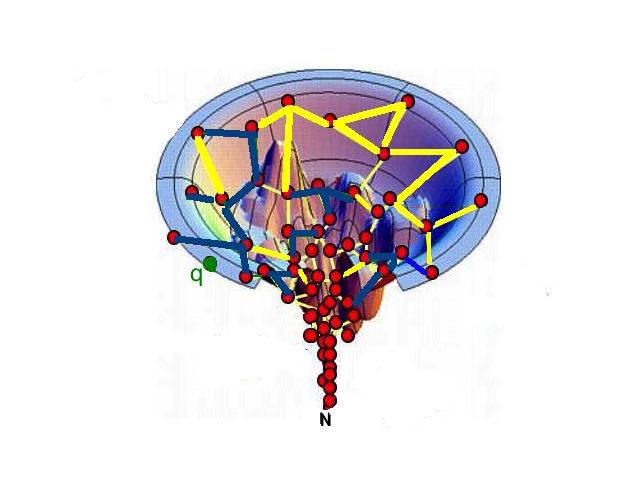
Connection Learning on Folding Landscape
|
| Applying Learning to Computational Biology |
Learning methods outperform
the best individual connection methods much of the time:
ANC-global produces lower weighted pathways
than Cluster, Euclidean, and lRMSD for 11 of the 23 proteins,
and ANC-local (blue bars) for 19 of the 23 proteins. Notice,
however, that the type of learning is important. ANC-local
with its local learning is much more successful than ANC-
global with its global approach.
In fact, ANC-local is the best approach for 18
out of the 23 proteins studied.
ANC-local performs as well as or better than the best
performing method for 12 out of 23 proteins (52% of the
time), while ANC-global performs best for only 3. Just as
with quality, the best performing individual connection method
varies between proteins: Euclidean is fastest for 11 proteins,
Cluster for 2, and lRMSD for 1. Euclidean is most often the
fastest method but is the best method in terms of quality for
only 1 protein.
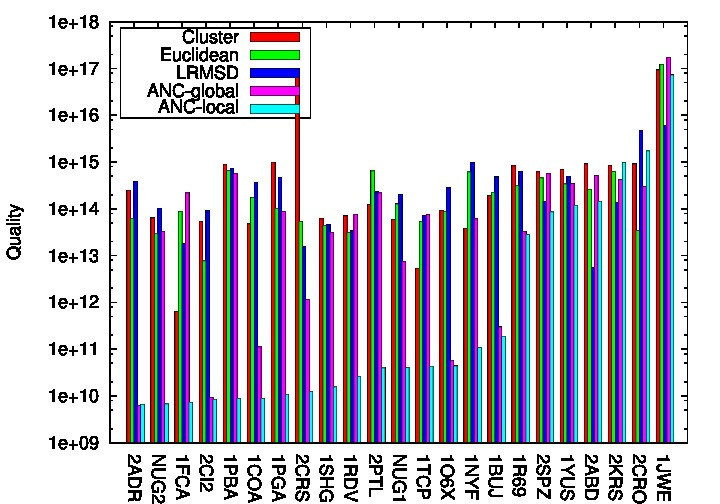
Quality Results
|
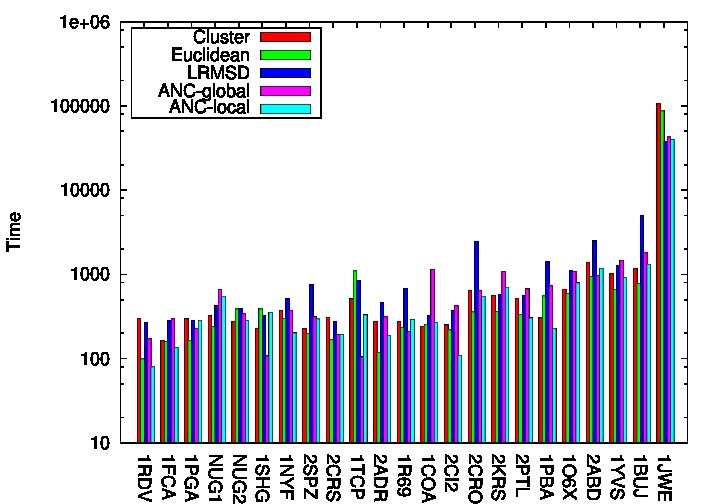
Time Results
|
| Applying Learning to Computational Biology |
Related Publications
Improved Sampling Based Motion Planning Through Local Learning, Chinwe Pamela Ekenna, Improved Sampling Based Motion Planning Through Local Learning, Aug 2016.
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@phdthesis{ekenna2016improved,
title={Improved sampling based motion planning through local learning},
author={Ekenna, Chinwe Pamela},
year={2016}
}
Abstract
Every motion made by a moving object is either planned implicitly, e.g., human natural movement from one point to another, or explicitly, e.g., pre-planned information about where a robot should move in a room to effectively avoid colliding with obstacles. Motion planning is a well-studied concept in robotics and it involves moving an object from a start to goal configuration. Motion planning arises in many application domains such as robotics, computer animation (digital actors), intelligent CAD (virtual prototyping and training) and even computational biology (protein folding and drug design). Interestingly, a single class of planners, sampling-based planners have proven effective in all these domains. Probabilistic Roadmap Methods (PRMs) are one type of sampling-based planners that sample robot configurations (nodes) and connect them via viable local paths (edges) to form a roadmap containing representative feasible trajectories. The roadmap is then queried to find solution paths between start and goal configurations. Different PRM strategies perform differently given different input parameters, e.g., workspace environments and robot definitions. Motion planning, however, is computationally hard âÃÂàit requires geometric path planning which has been shown to be PSPACE hard, complex representational issues for robots with known physical, geometric and temporal constraints, and challenging mapping/representing requirements for the workspace environment. Many important environments, e.g., houses, factories and airports, are heterogeneous, i.e., contain free, cluttered and narrow spaces. Heterogeneous environments, however, introduce a new set of problems for motion planning and PRM strategies because there is no ideal method suitable for all regions in the environment. In this work we introduce a technique that can adapt and apply PRM methods suitable for local regions in an environment. The basic strategy is to first identify a local region of the environment suitable for the current action based on identified neighbors. Next, based on past performance of methods in this region, adapt and pick a method to use at this time. This selection and adaptation is done by applying machine learning. By performing the local region creation in this dynamic fashion, we remove the need to explicitly partition the environment as was done in previous methods and which is difficult to do, slows down performance and includes the difficult process of determining what strategy to use even after making an explicit partitioning. Our method handles and removes these overheads. We show benefits of this approach in both planning robot motions and in protein folding simulations. We perform experiments on robots in simulation with different degrees of freedom and varying levels of heterogeneity in the environment and show an improvement in performance when our local learning method is applied. Protein folding simulations were performed on 23 proteins and we note an improvement in the quality of pathways produced with comparable performance in terms of time needed to build the roadmap.
Adaptive Local Learning in Sampling Based Motion Planning for Protein Folding, Chinwe Ekenna and Shawna Thomas and Nancy M. Amato, BMC Syst Biol, Special Issue from the 2015 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Vol: 10, Issue: 49, pp. 165-179, Aug 2016. DOI: 10.1186/s12918-016-0297-9
Keywords: Computational Biology, Protein Folding
Links : [Published]
BibTex
@article{ekenna-bmcsb-2016
, author = "Chinwe Ekenna and Shawna Thomas and Nancy M. Amato"
, title = "Adaptive Local Learning in Sampling Based Motion Planning for Protein Folding"
, journal = "BMC Syst Biol, Special Issue from IEEE International Conference on Bioinformatics and Biomedicine (BIBM)"
, volume = "10"
, number = "49"
, pages = "165--179"
, year = "2016"
, month = "August"
, doi = "10.1186/s12918-016-0297-9"
}
Abstract
Background
Simulating protein folding motions is an important problem in computational biology. Motion planning algorithms, such as Probabilistic Roadmap Methods, have been successful in modeling the folding landscape. Probabilistic Roadmap Methods and variants contain several phases (i.e., sampling, connection, and path extraction). Most of the time is spent in the connection phase and selecting which variant to employ is a difficult task. Global machine learning has been applied to the connection phase but is inefficient in situations with varying topology, such as those typical of folding landscapes.
Results
We develop a local learning algorithm that exploits the past performance of methods within the neighborhood of the current connection attempts as a basis for learning. It is sensitive not only to different types of landscapes but also to differing regions in the landscape itself, removing the need to explicitly partition the landscape. We perform experiments on 23 proteins of varying secondary structure makeup with 52ÃÂÃÂÃÂâÃÂÃÂÃÂÃÂÃÂÃÂÃÂÃÂ114 residues. We compare the success rate when using our methods and other methods. We demonstrate a clear need for learning (i.e., only learning methods were able to validate against all available experimental data) and show that local learning is superior to global learning producing, in many cases, significantly higher quality results than the other methods.
Conclusions
We present an algorithm that uses local learning to select appropriate connection methods in the context of roadmap construction for protein folding. Our method removes the burden of deciding which method to use, leverages the strengths of the individual input methods, and it is extendable to include other future connection methods.
The Impact of Approximate Methods on Local Learning in Motion Planning, Diane Uwacu, Chinwe Ekenna, Shawna Thomas, Nancy Amato, 1st International Workshop on Robot Learning and Planning (RLP 2016), in conjunction with RSS 2016, pp. 38-44, Ann Arbor, MI, Jun 2016.
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [ArXiv] [Manuscript]
BibTex
@inproceedings{uwacu-wrlp-2016
, author = "Diane Uwacu and Chinwe Ekenna and Shawna Thomas and Nancy M. Amato"
, title = "The Impact of Approximate Methods on Local Learning in Motion Planning"
, booktitle = "1st International Workshop on Robot Learning and Planning (RLP 2016), in conjunction with RSS 2016"
, month = "June"
, year = "2016"
, note = "http://chitsazlab.org/robotics/rlp2016/RLP_2016_paper_11.html"
}
Abstract
Machine learning methods have been applied to many motion planning algorithms including probabilistic roadmap methods (PRM). There are many variants of these methods and choosing the best one every time is hard and depends on local properties of the environment. A successful learning approach has been developed to offset this issue. This learning approach was applied to PRMs to help decide intelligently what method to utilize in dynamically created local regions of the environment or task space. It used exact neighbor finding approaches and removed the need to partition environments to get improved results. In this work we make further advances by introducing approximate neighbor finder methods. It has been established that approximate neighbor finding methods are faster than exact methods, still work well in connecting nodes to edges in PRMs, and that connection is robust to noise. We study what happens when noise is introduced into learning by using approximate methods instead of already studied exact methods. We show that the impact of noise on learning depends on how much learning needs to take place given the topology of the environment. Our results demonstrate a correlation between heterogeneity and the need for learning over a local region.
Improved Roadmap Connection via Local Learning for Sampling Based Planners, Chinwe Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato, Proc. IEEE/RSJ Int. Conf. Intel. Rob. Syst. (IROS), pp. 3227-3234, Hamburg, Germany, Oct 2015. DOI: 10.1109/IROS.2015.7353825
Keywords: Machine Learning, Motion Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{7353825, author={C. {Ekenna} and D. {Uwacu} and S. {Thomas} and N. M. {Amato}}, booktitle={2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, title={Improved roadmap connection via local learning for sampling based planners}, year={2015}, volume={}, number={}, pages={3227-3234},}
Abstract
Probabilistic Roadmap Methods (PRMs) solve the motion planing problem by constructing a roadmap (or graph) that models the motion space when feasible local motions exist. PRMs and variants contain several phases during roadmap generation i.e., sampling, connection, and query. Some work has been done to apply machine learning to the connection phase to decide which variant to employ, but it uses a global learning approach that is inefficient in heterogeneous situations. We present an algorithm that instead uses local learning: it only considers the performance history in the vicinity of the current connection attempt and uses this information to select good candidates for connection. It thus removes any need to explicitly partition the environment which is burdensome and typically difficult to do. Our results show that our method learns and adapts in heterogeneous environments, including a KUKA youBot with a fixed and mobile base. It finds solution paths faster for single and multi-query scenarios and builds roadmaps with better coverage and connectivity given a fixed amount of time in a wide variety of input problems. In all cases, our method outperforms the previous adaptive connection method and is comparable or better than the best individual method.
Studying Learning Techniques in Different Phases of PRM Construction, Chinwe Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato, In Machine Learning in Planning and Control of Robot Motion Workshop (IROS-MLPC), Hamburg, Germany, Oct 2015. DOI: 10.1109/IROS.2015.7353825
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [Published]
BibTex
no bib for now.
Abstract
Probabilistic Roadmap Methods (PRMs) solve the motion planning problem in two phases by sampling free configurations and connecting them together to build a map that is used to find a valid path. Existing algorithms are highly sensitive to the topology of the problem, and their efficiency depends on applying them to a compatible problem. Reinforcement learning has been applied to motion planning and rewards the action performed by planners during either sampling or connection, but not both. Previous work computed a global reward and action scheme, which saw a setback when heterogeneous environments were concerned. Local learning (connection) was recently introduced to offset this weakness identified during global learning, and there was some improvement in planner performance. These different learning schemes (global and local) have shown strengths and weaknesses individually. In this paper, we investigate local learning for sampling. We study what type of learning to apply when, and how the two phases of PRM roadmap construction interact, which has not been investigated before. We show the performance using each scheme on a KUKAyouBot, an 8 degree of freedom robot, and analyze what happens when they are all combined during roadmap construction
Adaptive Neighbor Connection using Node Characterization , Chinwe Ekenna , Shawna Thomas , Nancy M. Amato , N/A, N/A, Jan 2014.
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@MISC{Ekenna_adaptiveneighbor,
author = {Chinwe Ekenna and Shawna Thomas and Nancy M. Amato},
title = {Adaptive Neighbor Connection using Node Characterization},
year = {}
}
Abstract
Abstract. Sampling-based motion planning has been successful in plan-ning the motion for a wide variety of robot types. An important primitive of these methods involves connecting nodes by selecting candidate neigh-bors and checking the path between them. Recently, an approach called Adaptive Neighbor Connection (ANC) was proposed to automate neigh-bor selection using machine learning techniques. It adaptively selects a neighbor connection strategy from a candidate set of options and learns which strategy to use by examining their success rates and costs. In this work, we extend ANCÃÂâÃÂÃÂÃÂÃÂs reward function by characterizing the types of nodes added (including information about their connectivity) after each connection attempt. In doing so, we gain insight into the na-ture of these nodes and their ability to improve roadmap quality. We also refine ANCÃÂâÃÂÃÂÃÂÃÂs cost function by considering the computation time spent during each connection attempt so as to potentially learn faster and more efficient connectors. We show improved performance over selecting a sin-gle connection strategy and over ignoring node characterization during learning. We present results in a variety of 2D and 3D environments and are able to solve queries in half the time on average compared to the best single connection strategy and to the original ANC work. 1
Adaptive Neighbor Connection for PRMs: A Natural Fit for Heterogeneous Environments and Parallelism, Chinwe Ekenna, Sam Ade Jacobs, Shawna Thomas, Nancy M. Amato, In. Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, Nov 2013. DOI: 10.1109/IROS.2013.6696510
Keywords: Parallel Algorithms, Parallel Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{6696510, author={C. {Ekenna} and S. A. {Jacobs} and S. {Thomas} and N. M. {Amato}}, booktitle={2013 IEEE/RSJ International Conference on Intelligent Robots and Systems}, title={Adaptive neighbor connection for PRMs: A natural fit for heterogeneous environments and parallelism}, year={2013}, volume={}, number={}, pages={1249-1256}, doi={10.1109/IROS.2013.6696510}}
Abstract
Probabilistic Roadmap Methods (PRMs) are widely used motion planning methods that sample robot configurations (nodes) and connect them to form a graph (roadmap) containing feasible trajectories. Many PRM variants propose different strategies for each of the steps and choosing among them is problem dependent. Planning in heterogeneous environments and/or on parallel machines necessitates dividing the problem into regions where these choices have to be made for each one. Hand-selecting the best method for each region becomes infeasible. In particular, there are many ways to select connection candidates, and choosing the appropriate strategy is input dependent. In this paper, we present a general connection framework that adaptively selects a neighbor finding strategy from a candidate set of options. Our framework learns which strategy to use by examining their success rates and costs. It frees the user of the burden of selecting the best strategy and allows the selection to change over time. We perform experiments on rigid bodies of varying geometry and articulated linkages up to 37 degrees of freedom. Our results show that strategy performance is indeed problem/region dependent, and our adaptive method harnesses their strengths. Over all problems studied, our method differs the least from manual selection of the best method, and if one were to manually select a single method across all problems, the performance can be quite poor. Our method is able to adapt to changing sampling density and learns different strategies for each region when the problem is partitioned for parallelism.