
Supported By: NSF
One method of computing high clearance paths, Medial-Axis PRM, generates milestones along the medial axis of the planning space, or the set of points equidistant to two or more obstacles. The probability of sampling a configuration in a narrow passage for MAPRM depends on both its volume and its surrounding obstacle volume. Therefore, MAPRM can efficiently solve problems with narrow passages that have large surrounding obstacle volume. Howeverm MAPRM does not provide any gaurantee regarding the distribution of samples along the medial axis.
We propose a new planning variant, Uniform Medial-Axis PRM (UMAPRM), which uniformly samples the medial axis of the planning space. UMAPRM samples fixed length line segments from the planning space and analyzes adjacent configurations along the segment with a simple test determining if the medial axis has been crossed. The test analyzes changes in the nearest obstacles of successive configurations. It retains samples of maximal clearance when medial axis crossings are detected.
If there is not enough space for UMAPRM to generate line segments because the medial axis is too close to the boundary, it will invalidate the uniformity guarantee along the medial axis since fewer segments would be generated near the boundary. Hence, as in UOBPRM, we temporarily adjust the bounding box during line segment generation to ensure a uniform distribution of random line segments of fixed length within C-space. However, the planning problem is unchanged because we analyze segments with respect to the original bounding box.
We first show how certain environments cause MAPRM samples to be non-uniformly distributed, while UMAPRM samples are uniformly distributed along the medial axis.
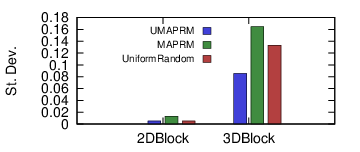
We compare UMAPRM's and MAPRM's distributions and levels of uniformity in simple 2D and 3D environments with a narrow passage created by two unit blocks. In each trial, we generated 1000 samples with each method along the segment of the medial axis between the blocks (we ignore the portions of the medial axis related to the boundary). As a measure of uniformity, we computed the standard deviation of the distances between each node and its closest neighbor. We averaged the results over 40 runs.
Two environments used to compare the distributions of UMAPRM and MAPRM
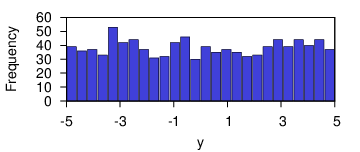
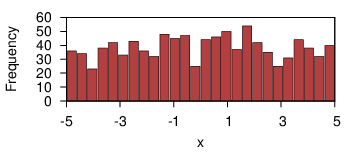
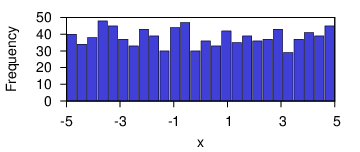
The results show that UMAPRM has a lower average standard deviation in both environments, implying a more uniform distribution. Additionally, UMAPRM has roughly the same average as uniformly random distributed points along the medial axis plane.
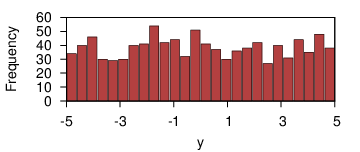
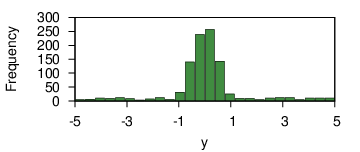
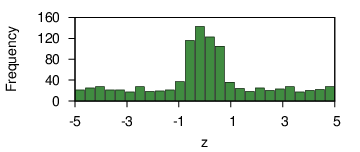
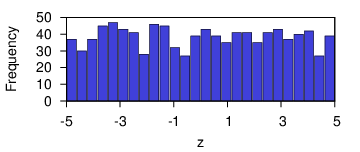
We also check the sample distributions from the maps generated from 1000 samples for UMAPRM, MAPRM, and uniform random sampling on the medial axis. MAPRM is highly biased towards the area between the blocks in the experiments, while UMAPRM is uniformly distributed acrossed the entire medial axis plane for both 2D and 3D environments.


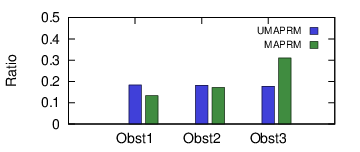
MAPRM has a known bias towards narrow passages because its probability of sampling in a narrow passage is proportional to the volume of the narrow passage and its surrounding obstacles. UMAPRM however, is unaffected by changes in surrounding obstacle volume. Here we generate 1000 samples along the medial axis of the whole space (considering the boundary) and determine how many lie inside the narrow passage.
Obstacle 1 has the smallest obstacle volume, while Obstacle 3 has the largest. We averaged the results over 40 trials.



UMAPRM consistently generates around 18% of nodes in each narrow passage, as the surface area of the medial axis in the narrow passage is constant. MAPRM performance is not consistent. It has difficulty generating samples in the narrow passgae in the smallest case, generating only about 13% in Obstacle 1.
 |
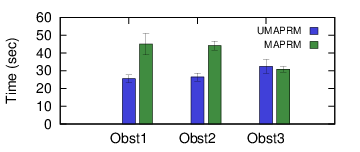
UMAPRM is also more consistent in the time it takes to generate successful samples across the three narrow passage examples, whereas MAPRM's efficiency is related to the distance each node must be pushed to reach the medial axis. As the obstacle width increases, each node mush traverse a smaller distance to the medial axis on average.
 |
We compare PRM, MAPRM, and UMAPRM for planning between start and goal configurations in four environments: 2DMaze, STunnel, 2DHeterogeneous, and Bug Trap. All results are averaged over 40 trials. While both MAPRM and UMAPRM sample configurations along the medial axis, MAPRM's distribution is not guaranteed to be uniform and performance is depenedent on the surrounding obstacle volume. Only UMAPRM guarantees a uniform distribution and its performance is unaffected by obstacle volume.
(I) TimeThe time is normalized to PRM. The results show that UMAPRM takes less time than MAPRM, but is slower than PRM since PRM performs fewer collision detection calls in 2DMaze and 2DHeterogeneous environment. UMAPRM outperforms both methods in STunnel environment. MAPRM is hampered because the volume of the surrouding obstacles is small compared with the rest of the planning space. In Bug Trap, UMAPRM finds the solution path in 2 hours, while neither PRM nor MAPRM is able to solve the problem after running for 10 hours.
 |
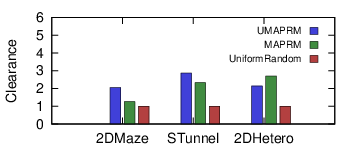
In addition to the time, we are also interested in the path quality by calculating the path clearance for each sampler. The clearance is normalized to PRM. UMAPRM generates higher quality paths than MAPRM in both 2DMaze and STunnel. In 2DHeterogeneous, the average path clearance between UMAPRM and MAPRM is comparable. Only UMAPRM solves the Bug Trap, so there is no normalized average path clearance in this environment.
 |
Related Publications
MARRT: Medial Axis Biased Rapidly-Exploring Random Trees, Jory Denny, Evan Greco, Shawna L. Thomas, Nancy M. Amato, 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 90-97, Hong Kong, China, Jun 2014. DOI: 10.1109/ICRA.2014.6906594 @INPROCEEDINGS{6906594, author={J. {Denny} and E. {Greco} and S. {Thomas} and N. M. {Amato}}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA)}, title={MARRT: Medial Axis biased rapidly-exploring random trees}, year={2014}, volume={}, number={}, pages={90-97}, doi={10.1109/ICRA.2014.6906594}} Motion planning is a difficult and widely studied problem in robotics. Current research aims not only to find feasible paths, but to ensure paths have certain properties, e.g., shortest or safest paths. This is difficult for current state-of-the-art sampling-based techniques as they typically focus on simply finding any path. Despite this difficulty, sampling-based techniques have shown great success in planning for a wide range of applications. Among such planners, Rapidly-Exploring Random Trees (RRTs) search the planning space by biasing exploration toward unexplored regions. This paper introduces a novel RRT variant, Medial Axis RRT (MARRT), which biases tree exploration to the medial axis of free space by pushing all configurations from expansion steps towards the medial axis. We prove that this biasing increases the tree's clearance from obstacles. Improving obstacle clearance is useful where path safety is important, e.g., path planning for robots performing tasks in close proximity to the elderly. Finally, we experimentally analyze MARRT, emphasizing its ability to effectively map difficult passages while increasing obstacle clearance, and compare it to contemporary RRT techniques.
Keywords: Motion Planning, Sampling-Based Motion Planning
Links : [Published] BibTex
Abstract
UMAPRM: Uniformly Sampling the Medial Axis, Hsin-Yi (Cindy) Yeh, Jory Denny, Aaron Lindsey, Shawna L. Thomas, Nancy M. Amato, 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 5798 -5803, Hong Kong, China, Jun 2014. DOI: 10.1109/ICRA.2014.6907711 @INPROCEEDINGS{6907711, author={H. C. {Yeh} and J. {Denny} and A. {Lindsey} and S. {Thomas} and N. M. {Amato}}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA)}, title={UMAPRM: Uniformly sampling the medial axis}, year={2014}, volume={}, number={}, pages={5798-5803}, doi={10.1109/ICRA.2014.6907711}} Maintaining clearance, or distance from obstacles, is a vital component of successful motion planning algorithms. Maintaining high clearance often creates safer paths for robots. Contemporary sampling-based planning algorithms that utilize the medial axis, or the set of all points equidistant to two or more obstacles, produce higher clearance paths. However, they are biased heavily toward certain portions of the medial axis, sometimes ignoring parts critical to planning, e.g., specific types of narrow passages. We introduce Uniform Medial Axis Probabilistic RoadMap (UMAPRM), a novel planning variant that generates samples uniformly on the medial axis of the free portion of C space . We theoretically analyze the distribution generated by UMAPRM and show its uniformity. Our results show that UMAPRM's distribution of samples along the medial axis is not only uniform but also preferable to other medial axis samplers in certain planning problems. We demonstrate that UMAPRM has negligible computational overhead over other sampling techniques and can solve problems the others could not, e.g., a bug trap. Finally, we demonstrate UMAPRM successfully generates higher clearance paths in the examples.
Keywords: Motion Planning, Sampling-Based Motion Planning
Links : [Published] BibTex
Abstract
A general framework for sampling on the medial axis of the free space, Jyh-Ming Lien, Shawna L. Thomas, Nancy M. Amato, In Proc. IEEE Int. Conf. Robot. Autom. (ICRA), Vol: 3, pp. 4439-4444, Taipei, Taiwan, Sep 2003. DOI: 10.1109/ROBOT.2003.1242288 @INPROCEEDINGS{1242288, We propose a general framework for sampling the configuration space in which randomly generated configurations, free or not, are retracted onto the medial axis of the free space. Generalizing our previous work, this framework provides a template encompassing all possible retraction approaches. It also removes the requirement of exactly computing distance metrics thereby enabling application to more realistic high dimensional problems. In particular, our framework supports methods that retract a given configuration exactly or approximately onto the medial axis. As in our previous work, exact methods provide fast and accurate retraction in low (2 or 3) dimensional space. We also propose new approximate methods that can be applied to high dimensional problems, such as many DOF articulated robots. Theoretical and experimental results show improved performance on problems requiring traversal of narrow passages. We also study tradeoffs between accuracy and efficiency for different levels of approximation, and how the level of approximation effects the quality of the resulting roadmap.
Keywords: Medial Axis, Sampling-Based Motion Planning
Links : [Published] BibTex
author={ {Jyh-Ming Lien} and S. L. {Thomas} and N. M. {Amato}},
booktitle={2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422)}, title={A general framework for sampling on the medial axis of the free space},
year={2003},
volume={3},
number={},
pages={4439-4444 vol.3},
doi={10.1109/ROBOT.2003.1242288}}Abstract
A Probabilistic Method for Rigid-Body Motion Planning Using Sampling from the Medial Axis of the Free Space, Steven A. Wilmarth, Doctoral Dissertation, Texas A&M University, pp. 1-108, Dec 1999. @phdthesis{wilmarth-phd-1999 Motion planning in the presence of obstacles is an important problem in robotics with numerous applications in other areas. While complete motion planning algorithms do exist, they are rarely used in practice since they are computationally infeasible in all but the simplest cases. For this reason, many recent efforts have focused on probabilistic methods, which sacrifice completeness in favor of computational feasibility and applicability. In particular, several algorithms, known as probabilistic roadmap planners, have been shown to perform well in a number of practical situations; however, their performance degrades when paths are required to pass through narrow passages in the free space. In this dissertation we present a method of sampling the configuration space of a rigid body moving in three dimensions in which randomly generated configurations are retracted onto the medial axis of the free space. We develop some theory of the medial axis on the configuration space SE(3) and present algorithms that perform the retraction while avoiding explicit computation of the medial axis. Finally, we give some preliminary experimental results demonstrating the performance of the algorithm.
Keywords: Computational Geometry, Medial Axis, Sampling-Based Motion Planning
Links : [Published] BibTex
, author = "Steven A. Wilmarth"
, title = "A Probabilistic Method for Rigid-Body Motion Planning Using Sampling from the Medial Axis of the Free Space"
, school = "Department of Mathematics, Texas A\&M University"
, year = "1999"
, month = "December"
}
Abstract
Motion planning for a rigid body using random networks on the medial axis of the free space, Steven A. Wilmarth, Nancy M. Amato, Peter F. Stiller, Proceedings of the Annual Symposium on Computational Geometry (SOCG), pp. 173-180, Jun 1999. DOI: 10.1145/304893.304967 @INPROCEEDINGS{was-mprb-99, Several motion planning methods using networks of randomly generated nodes in the free space have been shown
to perform well in a number of cases, however their performance
degrades when paths are required to pass through narrow
passages in the,jree space. In [16] we proposed MAPRM,
a method of sampling the configuration space in which randomly
generated configurations, free or not, are retracted
onto the medial axis of the free space without having to first
compute the medial axis; this was shown to increase sampling
in narrow passages. In this paper we give details of
the MAPRM algorithm for the case of a free-flying rigid
body moving in three dimensions, and show that the retraction
may be carried out without explicitly computing the C-obstacles
or the medial axis. We give theoretical arguments
to show that this improves sampling in narrow corridors, and
present preliminary experimental results comparing the performance
to uniform random sampling from the free space.
Keywords: Computational Geometry, Medial Axis, Sampling-Based Motion Planning
Links : [Published] BibTex
author={Steven A. Wilmarth and and Nancy M. Amato and Peter F. Stiller},
booktitle={Proceedings of the Annual Symposium on Computational Geometry}
title={Motion Planning for a Rigid Body Using Random Networks on the Medial Axis of the Free Space},
year={1999},
pages={173-180},
doi={10.1145/304893.304967}}Abstract
MAPRM: A Probabilistic Roadmap Planner with Sampling on the Medial Axis of the Free Space, S. A. Wilmarth, N. M. Amato, P. F. Stiller, Proceedings of IEEE International Conference on Robotics and Automation, pp. 1024-1031, Detroit, MI, May 1999. DOI: 10.1109/ROBOT.1999.772448 @INPROCEEDINGS{772448, Probabilistic roadmap planning methods have been shown to perform well in a number of practical situations, but their performance degrades when paths are required to pass through narrow passages in the free space. We propose a new method of sampling the configuration space in which randomly generated configurations, free or not, are retracted onto the medial axis of the free space. We give algorithms that perform this retraction while avoiding explicit computation of the medial axis, and we show that sampling and retracting in this manner increases the number of nodes found in small volume corridors in a way that is independent of the volume of the corridor and depends only on the characteristics of the obstacles bounding it. Theoretical and experimental results are given to show that this improves performance on problems requiring traversal of narrow passages.
Keywords: Medial Axis, Sampling-Based Motion Planning
Links : [Published] BibTex
author={Wilmarth, S.A. and Amato, N.M. and Stiller, P.F.},
booktitle={Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C)},
title={MAPRM: a probabilistic roadmap planner with sampling on the medial axis of the free space},
year={1999},
volume={2},
number={},
pages={1024-1031 vol.2},
doi={10.1109/ROBOT.1999.772448}}
Abstract