
STAPL Repository
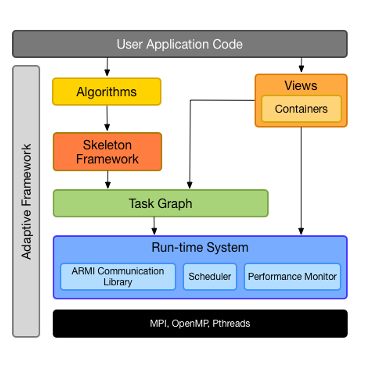
Gitlab repository for STAPL and the STAPL Graph Library (SGL) where one can find source code, documentation, and tutorials.
Parasol Planning Library - PPL

GitHub repository for the Parasol Planning Library - PPL.
Motion Planning Crash Course
Learn the basics of motion planning and using the Parasol Planning Library.
Motion Planning Benchmarks | Parasol Lab
A source of models useful for testing motion planning algorithms
Benchmarks for Geometric Decomposition Algorithms | Parasol Lab
A source of models useful for testing motion planning algorithms