
The models contained on this page represent our attempt to try to start a collection of benchmark problems that can be used to compare various motion planning algorithms. As such, these models are available for public, non-commercial use provided that appropriate reference is made to the source/creator of the model. Also, if you have any models that you could contribute to this effort, please let us know and we will be happy to post them on this page.
View format documentation and specifications
Alpha Puzzle

The alpha puzzle benchmark is a motion planning problem containing a narrow passage. The puzzle consists of two tubes, each twisted into an alpha shape; one tube is the obstacle and the other the moving object (robot). The objective is to separate the intertwined tubes.
Flange Problem
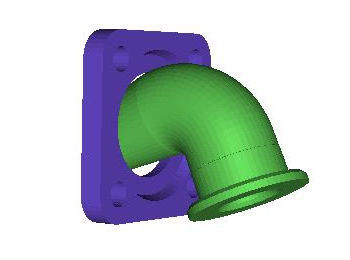
The flange benchmark is a motion planning problem containing a narrow passage. It is representative of a type of problem that might occur in a maintainabilty study of a mechicanical CAD design.
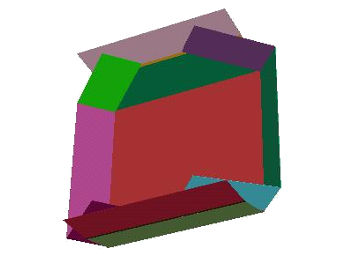
Pentomino Puzzle

The Pentomino Puzzle environment was created to test disassembly planning methods. The puzzle is "solved" in its initial (assembled) configuration, and the goal is to disassemble the puzzle by moving each piece an arbitrary distance away from all other pieces.
Box Folding Problem
The box folding problem is a motion planning problem containing a narrow passage. The objective is to fold the articulated model into its final box shape. There are no external obstacles in the enviroment, but self-collision among the links (connected by revolute joints) must be avoided.
Bright Building
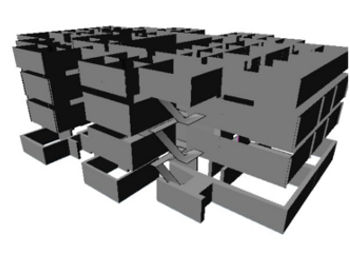
The Bright Building environment contains the first 4 floors of HRBB. The building consists of many rooms, corridors, and stiarwells. Agents navigating in this environment must be able to extract paths quickly through the environment in order to perform certain behaviors.
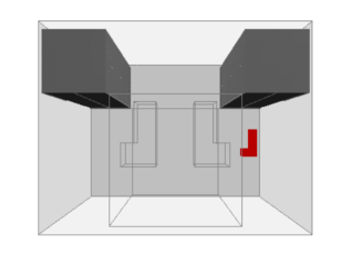
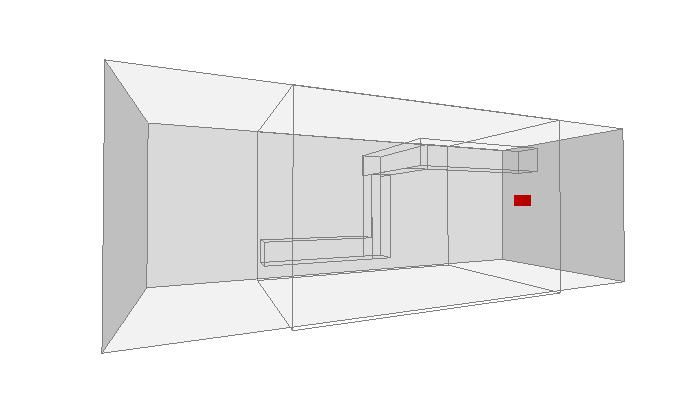
Bug-Trap
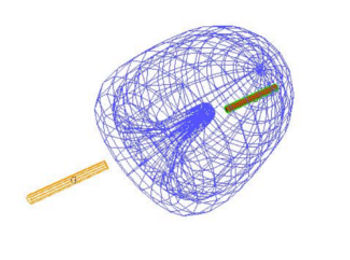
The obstacle (trap) is a three-dimensional bugtrap with a small opening. The robot (bug) is a stick that barely fits through the trap exit. The goal is for the bug to get out of the trap. The model is available in BYU format, with each piece represented in a separate file.
Hedgehog
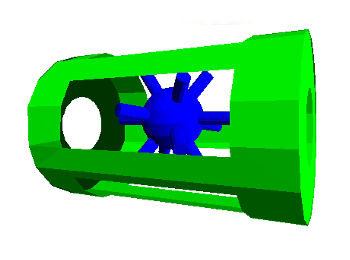
The Hedgehog environment is a motion planning problem containing a few
homotopically different narrow passages that the
robot (spiked sphere) can traverse through. The cage has five different possible
escape routes of which the robot must find one of them to leave the cage.
The models are available in BYU format.
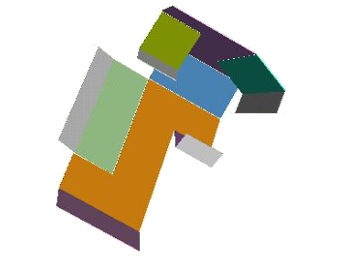
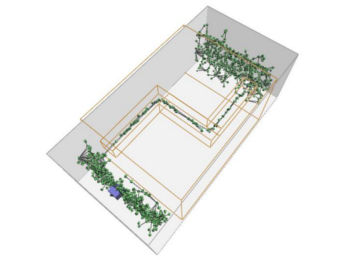
Heterogenous

This environment contains an assortment of obstacles of varying sizes and shapes
and also includes a winding narrow passage.
The model is available in BYU format,
with each piece represented in a separate file.
L Tunnel
The L tunnel environment contains two L-shaped passages the robot (also L-shaped)
must traverse.
The model is available in BYU format,
with each piece represented in a separate file.
Maze
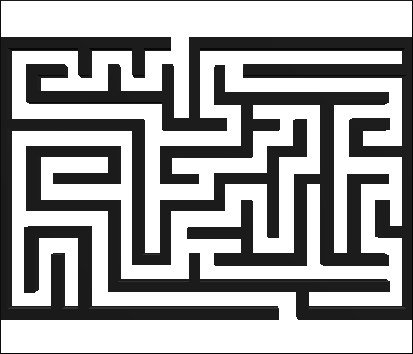
The maze environment represents a long narrow passage with branching passages.
The goal is to guide the robot from the start to the end through the passages.
The model is available in BYU format,
with each piece represented in a separate file.
Periscope Folding Problem
The periscope folding problem is a motion planning problem containing a narrow passage. The objective is to fold the articulated model into its final periscope shape. There are no external obstacles in the enviroment, but self-collision among the links (connected by revolute joints) must be avoided.
Serial Walls

The Serial Walls environment consists of a set of walls (with openings) that the stick (the robot) has to traverse.
Simple Obstacles
The simple obstacles environment includes versions with varying obstacle sizes
and passage widths.
The model is available in BYU format,
with each piece represented in a separate file.
S Tunnel
The S tunnel environment consists of two rectangular prisms. The obstacle is a
rectangular prism with a long narrow tunnel removed from it. The robot
(rectangular prisms of varying dimensions) must navigate through the tunnel.
The model is available in BYU format,
with each piece represented in a separate file.
Zig-Zag
The Zig-Zag environment represents an easy winding narrow passage which fools
many sampling-based planners. It is a nice 2D problem, to study qualities of
various planners.
The model is available in BYU format,
with each piece represented in a separate file.
Z Tunnel
The Z tunnel environment contains an obstacle in the shape of a rectangular prism with a single narrow passage removed from the obstacle in the shape of a Z. The robot (rectangular prisms of varying dimensions) must navigate through the passageway.