Related Publications
Hypergraph-based Multi-robot Motion Planning with Topological Guidance, Courtney McBeth, James Motes, Marco Morales, Nancy M. Amato, ArXiv Preprint, Nov 2023.
Keywords: Motion Planning, Multi-Agent, Workspace Topology
Links : [ArXiv]
BibTex
@misc{mcbeth2023hypergraphbased,
title={Hypergraph-based Multi-robot Motion Planning with Topological Guidance},
author={Courtney McBeth and James Motes and Marco Morales and Nancy M. Amato},
year={2023},
eprint={2311.10176},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
Abstract
We present a multi-robot motion planning algorithm that efficiently finds paths for robot teams up to ten times larger than existing methods in congested settings with narrow passages in the environment. Narrow passages represent a source of difficulty for sampling-based motion planning algorithms. This problem is exacerbated for multi-robot systems where the planner must also avoid inter-robot collisions within these congested spaces, requiring coordination. Topological guidance, which leverages information about the robot's environment, has been shown to improve performance for mobile robot motion planning in single robot scenarios with narrow passages. Additionally, our prior work has explored using topological guidance in multi-robot settings where a high degree of coordination is required of the full robot group. This high level of coordination, however, is not always necessary and results in excessive computational overhead for large groups. Here, we propose a novel multi-robot motion planning method that leverages topological guidance to inform the planner when coordination between robots is necessary, leading to a significant improvement in scalability.
Hierarchical Annotated Skeleton-Guided Tree-based Motion Planning, Diane Uwacu, Ananya Yammanuru, Keerthana Nallamotu, Vasu Chalasani, Marco Morales, Nancy M. Amato, arXiv Preprint, Sep 2023.
Keywords: Lazy Planning, Motion Planning, Workspace Topology
Links : [ArXiv]
BibTex
@misc{uwacu2023hierarchical,
title={Hierarchical Annotated Skeleton-Guided Tree-based Motion Planning},
author={Diane Uwacu and Ananya Yammanuru and Keerthana Nallamotu and Vasu Chalasani and Marco Morales and Nancy M. Amato},
year={2023},
eprint={2309.10801},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
Abstract
We present a hierarchical tree-based motion planning strategy, HAS-RRT, guided by the workspace skeleton to solve motion planning problems in robotics and computational biology. Relying on the information about the connectivity of the workspace and the ranking of available paths in the workspace, the strategy prioritizes paths indicated by the workspace guidance to find a valid motion plan for the moving object efficiently. In instances of suboptimal guidance, the strategy adapts its reliance on the guidance by hierarchically reverting to local exploration of the planning space. We offer an extensive comparative analysis against other tree-based planning strategies and demonstrate that HAS-RRT reliably and efficiently finds low-cost paths. In contrast to methods prone to inconsistent performance across different environments or reliance on specific parameters, HAS-RRT is robust to workspace variability.
Scalable Multi-robot Motion Planning for Congested Environments With Topological Guidance, Courtney McBeth, James Motes, Diane Uwacu, Marco Morales, Nancy M. Amato, In IEEE Robotics and Automation Letters, Aug 2023. DOI: 10.1109/LRA.2023.3312980
Keywords: Motion Planning, Multi-Agent, Workspace Topology
Links : [Published] [ArXiv] [Video]
BibTex
@ARTICLE{10243143,
author={McBeth, Courtney and Motes, James and Uwacu, Diane and Morales, Marco and Amato, Nancy M.},
journal={IEEE Robotics and Automation Letters},
title={Scalable Multi-robot Motion Planning for Congested Environments With Topological Guidance},
year={2023},
volume={},
number={},
pages={1-8},
doi={10.1109/LRA.2023.3312980}}
Abstract
Multi-robot motion planning (MRMP) is the problem of finding collision-free paths for a set of robots in a continuous state space. The difficulty of MRMP increases with the number of robots and is exacerbated in environments with narrow passages that robots must pass through, like warehouse aisles where coordination between robots is required. In single-robot settings, topology-guided motion planning methods have shown improved performance in these constricted environments. In this work, we extend an existing topology-guided single-robot motion planning method to the multi-robot domain to leverage the improved efficiency provided by topological guidance. We demonstrate our method's ability to efficiently plan paths in complex environments with many narrow passages, scaling to robot teams of size up to 25 times larger than existing methods in this class of problems. By leveraging knowledge of the topology of the environment, we also find higher-quality solutions than other methods.
Hierarchical Planning With Annotated Skeleton Guidance, Diane Uwacu, Ananya Yammanuru, Marco Morales, Nancy M. Amato, IEEE Robotics and Automation Letters (RA-L), Vol: 7, Issue: 4, pp. 11055-11061, Oct 2022. DOI: 10.1109/LRA.2022.3196885
Keywords: Lazy Evaluation, Motion Planning, Workspace Topology
Links : [Published] [Manuscript] [Video]
BibTex
@ARTICLE{9851528,
author={Uwacu, Diane and Yammanuru, Ananya and Morales, Marco and Amato, Nancy M.},
journal={IEEE Robotics and Automation Letters},
title={Hierarchical Planning With Annotated Skeleton Guidance},
year={2022},
volume={7},
number={4},
pages={11055-11061},
doi={10.1109/LRA.2022.3196885}}
Abstract
We present a hierarchical skeleton-guided motion planning algorithm to guide mobile robots. A good skeleton maps the connectivity of the subspace of c-space containing significant degrees of freedom and is able to guide the planner to find the desired solutions fast. However, sometimes the skeleton does not closely represent the free c-space, which often misleads current skeleton-guided planners. The hierarchical skeleton-guided planning strategy gradually relaxes its reliance on the workspace skeleton as C-space is sampled, thereby incrementally returning a sub-optimal path, a feature that is not guaranteed in the standard skeleton-guided algorithm. Experimental comparisons to the standard skeleton guided planners and other lazy planning strategies show significant improvement in roadmap construction run time while maintaining path quality for multi-query problems in cluttered environments.
Evaluating Guiding Spaces for Motion Planning, Amnon Attali, Stav Ashur, Isaac Burton Love, Courtney McBeth, James Motes, Diane Uwacu, Marco Morales, Nancy M. Amato, IROS 2022, Workshop for Evaluating Motion Planning Performance, Kyoto, Japan, Oct 2022.
Keywords: Algorithms, Guidance
Links : [ArXiv]
BibTex
@misc{https://doi.org/10.48550/arxiv.2210.08640,
doi = {10.48550/ARXIV.2210.08640},
url = {https://arxiv.org/abs/2210.08640},
author = {Attali, Amnon and Ashur, Stav and Love, Isaac Burton and McBeth, Courtney and Motes, James and Uwacu, Diane and Morales, Marco and Amato, Nancy M.},
keywords = {Robotics (cs.RO), Artificial Intelligence (cs.AI), FOS: Computer and information sciences, FOS: Computer and information sciences},
title = {Evaluating Guiding Spaces for Motion Planning},
publisher = {arXiv},
year = {2022},
copyright = {Creative Commons Attribution 4.0 International}
}
Abstract
Randomized sampling based algorithms are widely used in robot motion planning due to the problem's intractability, and are experimentally effective on a wide range of problem instances. Most variants do not sample uniformly at random, and instead bias their sampling using various heuristics for determining which samples will provide more information, or are more likely to participate in the final solution. In this work, we define the motion planning guiding space, which encapsulates many seemingly distinct prior works under the same framework. In addition, we suggest an information theoretic method to evaluate guided planning which places the focus on the quality of the resulting biased sampling. Finally, we analyze several motion planning algorithms in order to demonstrate the applicability of our definition and its evaluation.
Topology-Guided Roadmap Construction with Dynamic Region Sampling, Read Sandström, Diane Uwacu, Jory Denny, Nancy M. Amato, IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 4,, pp. 6161-6168, virtual, Oct 2020. DOI: 10.1109/LRA.2020.3010487
Keywords: Sampling-Based Motion Planning, Workspace Topology
Links : [Published]
BibTex
@ARTICLE{9144398,
author={R. {Sandström} and D. {Uwacu} and J. {Denny} and N. M. {Amato}},
journal={IEEE Robotics and Automation Letters},
title={Topology-Guided Roadmap Construction With Dynamic Region Sampling},
year={2020},
volume={5},
number={4},
pages={6161-6168},}
Abstract
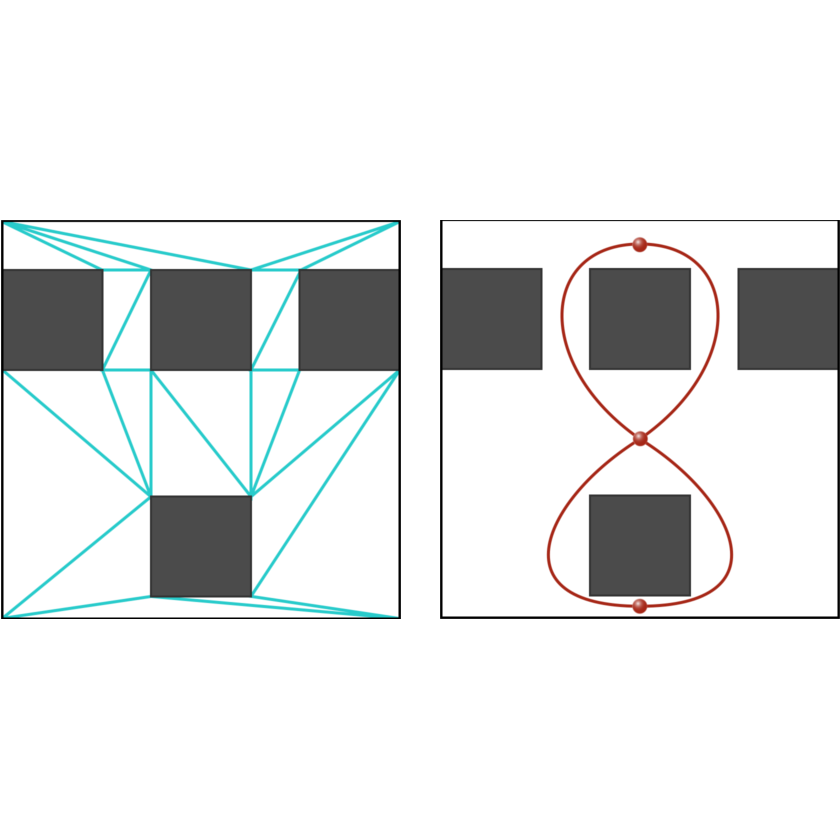
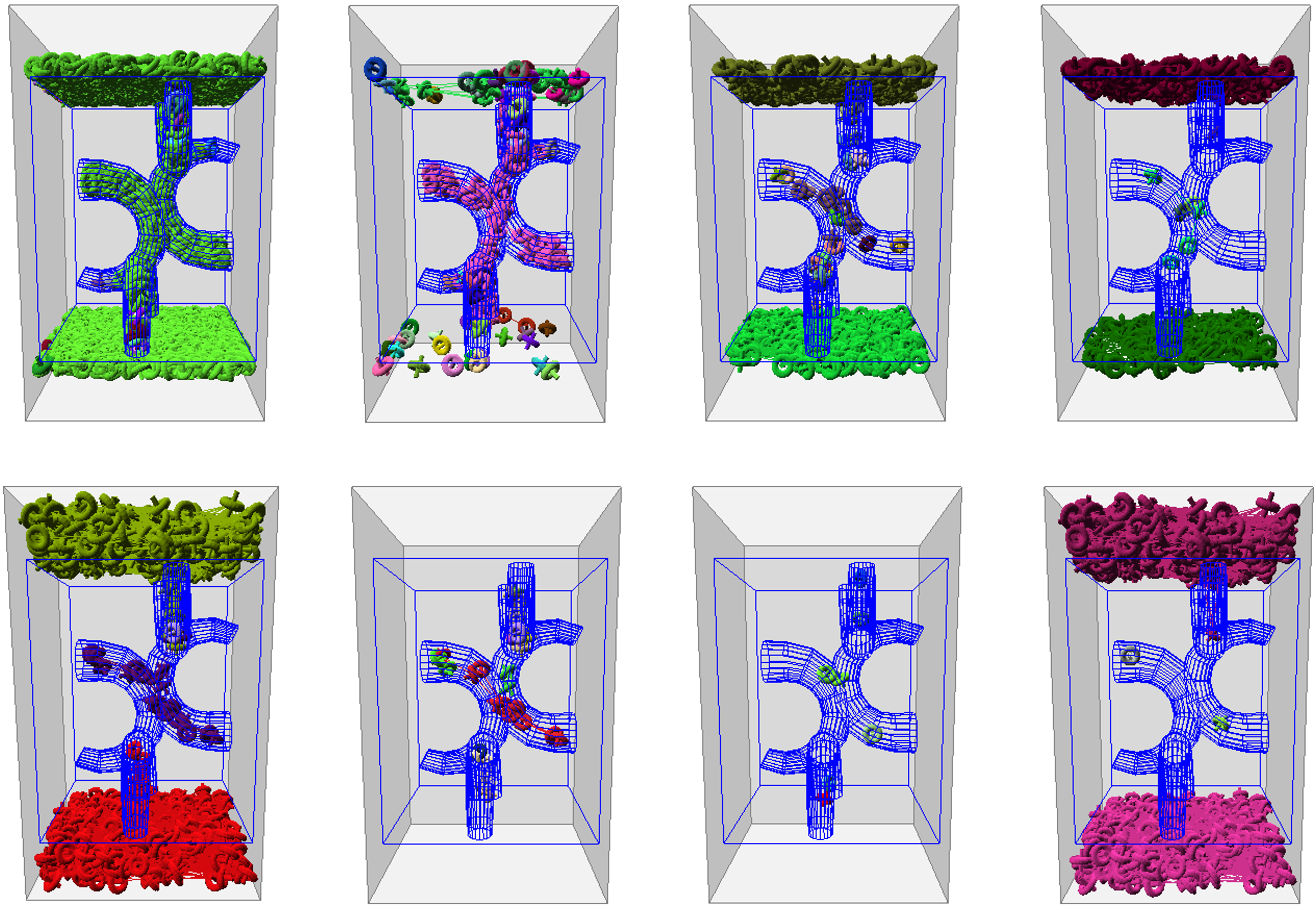
Many types of planning problems require discovery of multiple pathways through the environment, such as multi-robot coordination or protein ligand binding. The Probabilistic Roadmap (PRM) algorithm is a powerful tool for this case, but often cannot efficiently connect the roadmap in the presence of narrow passages. In this letter, we present a guidance mechanism that encourages the rapid construction of well-connected roadmaps with PRM methods. We leverage a topological skeleton of the workspace to track the algorithm's progress in both covering and connecting distinct neighborhoods, and employ this information to focus computation on the uncovered and unconnected regions. We demonstrate how this guidance improves PRM's efficiency in building a roadmap that can answer multiple queries in both robotics and protein ligand binding applications.
Using Guided Motion Planning to Study Binding Site Accessibility, Diane Uwacu, Abigail Ren, Shawna Thomas, Nancy M. Amato, Proceedings of the 11th ACM International Conference on Bioinformatics, Computational Biology and Health Informatics, Issue: 109, (Virtual) New York, USA, Sep 2020. DOI: 10.1145/3388440.3414707
Keywords: Computational Biology, Ligand Binding, Motion Planning
Links : [Published] [Manuscript]
BibTex
@inbook{10.1145/3388440.3414707,
author = {Uwacu, Diane and Ren, Abigail and Thomas, Shawna and Amato, Nancy M.},
title = {Using Guided Motion Planning to Study Binding Site Accessibility},
year = {2020},
isbn = {9781450379649},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3388440.3414707},
abstract = {Computational methods are commonly used to predict protein-ligand interactions. These methods typically search for regions with favorable energy that geometrically fit the ligand, and then rank them as potential binding sites. While this general strategy can provide good predictions in some cases, it does not do well when the binding site is not accessible to the ligand. In addition, recent research has shown that in some cases protein access tunnels play a major role in the activity and stability of the protein's binding interactions. Hence, to fully understand the binding behavior of such proteins, it is imperative to identify and study their access tunnels. In this work, we present a motion planning algorithm that scores protein binding site accessibility for a particular ligand. This method can be used to screen ligand candidates for a protein by eliminating those that cannot access the binding site. This method was tested on two case studies to analyze effects of modifying a protein's access tunnels to increase activity and/or stability as well as study how a ligand inhibitor blocks access to the protein binding site.},
booktitle = {Proceedings of the 11th ACM International Conference on Bioinformatics, Computational Biology and Health Informatics},
articleno = {109},
numpages = {10}
}
Abstract
Computational methods are commonly used to predict protein-ligand interactions. These methods typically search for regions with favorable energy that geometrically fit the ligand, and then rank them as potential binding sites. While this general strategy can provide good predictions in some cases, it does not do well when the binding site is not accessible to the ligand. In addition, recent research has shown that in some cases protein access tunnels play a major role in the activity and stability of the protein's binding interactions. Hence, to fully understand the binding behavior of such proteins, it is imperative to identify and study their access tunnels. In this work, we present a motion planning algorithm that scores protein binding site accessibility for a particular ligand. This method can be used to screen ligand candidates for a protein by eliminating those that cannot access the binding site. This method was tested on two case studies to analyze effects of modifying a protein's access tunnels to increase activity and/or stability as well as study how a ligand inhibitor blocks access to the protein binding site.
Dynamic Region-biased Rapidly-exploring Random Trees, Jory Denny and Read Sandstrom and Andrew Bregger and Nancy M. Amato, Algorithmic Foundations of Robotics XII. Springer Proceedings in Advanced Robotics (SPAR). The 2016 Workshop on the Algorithmic Foundations of Robotics (WAFR), Vol: 13, pp. 640-655, May 2020. DOI: 10.1007/978-3-030-43089-4_41
Keywords: Sampling-Based Motion Planning, Workspace Topology
Links : [Published]
BibTex
@article{denny-wafr-2016
, author = "Jory Denny and Read Sandstrom and Andrew Bregger and Nancy M. Amato"
, title = "Dynamic Region-biased Rapidly-exploring Random Trees"
, journal = "Algorithmic Foundations of Robotics XII. Springer Proceedings in Advanced Robotics (SPAR)"
, volume = "13"
, publisher = "Springer, Cham."
, pages = "640-655"
, year = "2020"
, doi = "10.1007/978-3-030-43089-4\_41"
, note = "Presented at the 2016 Workshop on the Algorithmic Foundations of Robotics (WAFR)."
}
Abstract
Current state-of-the-art motion planners rely on samplingbased planning to explore the problem space for a solution. However, sampling valid configurations in narrow or cluttered workspaces remains a challenge. If a valid path for the robot correlates to a path in the workspace, then the planning process can employ a representation of the workspace that captures its salient topological features. Prior approaches have investigated exploiting geometric decompositions of the workspace to bias sampling; while beneficial in some environments, complex narrow passages remain challenging to navigate.
In this work, we present Dynamic Region-biased RRT, a novel samplingbased planner that guides the exploration of a Rapidly-exploring Random Tree (RRT) by moving sampling regions along an embedded graph that captures the workspace topology. These sampling regions are dynamically created, manipulated, and destroyed to greedily bias sampling through unexplored passages that lead to the goal. We show that our approach reduces online planning time compared with related methods on a set of maze-like problems.
Geometric Approximations and Their Application to Motion Planning, Mukulika Ghosh, Doctoral Dissertation, Texas A&M University, College Station, TX, Aug 2019.
Keywords: Computational Geometry, Convex Decomposition, Sampling-Based Motion Planning
Links : [Published]
BibTex
@phdthesis{ghosh-phd-2019
, author = "Mukulika Ghosh"
, title = "Geometric Approximations and Their Application to Motion Planning"
, school = "Department of Computer Science and Engineering, Texas A\&M University"
, month = "August"
, year = "2019"
, note = "https://oaktrust.library.tamu.edu/handle/1969.1/187961"
}
Abstract
Geometric approximation methods are a preferred solution to handle complexities (such as a large volume or complex features such as concavities) in geometric objects or environments containing them. Complexities often pose a computational bottleneck for applications such as motion planning. Exact resolution of these complexities might introduce other complexities such as unmanageable number of components. Hence, approximation methods provide a way to handle these complexities in a manageable state by trading off some accuracy. In this dissertation, two novel geometric approximation methods are studied: aggregation hierarchy and shape primitive skeleton. The aggregation hierarchy is a hierarchical clustering of polygonal or polyhedral objects. The shape primitive skeleton provides an approximation of bounded space as a skeleton of shape primitives. These methods are further applied to improve the performance of motion planning applications. We evaluate the methods in environments with 2D and 3D objects. The aggregation hierarchy groups nearby objects into individual objects. The hierarchy is created by varying the distance threshold that determines which objects are nearby. This creates levels of detail of the environment. The hierarchy of the obstacle space is then used to create a decom-position of the complementary space (i.e, free space) into a set of sampling regions to improve the efficiency and accuracy of the sampling operation of the sampling based motion planners. Our results show that the method can improve the efficiency (10 â 70% of planning time) of sampling based motion planning algorithms. The shape primitive skeleton inscribes a set of shape primitives (e.g., sphere, boxes) inside a bounded space such that they represent the skeleton or the connectivity of the space. We apply the shape primitive skeletons of the free space and obstacle space in motion planning problems to improve the collision detection operation. Our results also show the use of shape primitive skeleton in both spaces improves the performance of collision detectors (by 20 â 70% of collision detection time) used in motion planning algorithms. In summary, this dissertation evaluates how geometric approximation methods can be applied to improve the performance of motion planning methods, especially, sampling based motion planning methods
Motion Planning using Hierarchical Aggregation of Workspace Obstacles, Mukulika Ghosh, Shawna Thomas, Marco Morales, Sam Rodriguez, and Nancy M. Amato, In Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5716-5721, Daejeon, Korea, Oct 2016. DOI: 10.1109/IROS.2016.7759841
Keywords: Motion Planning, Workspace Topology
Links : [Published]
BibTex
@inproceedings{ghosh2016motion,
title={Motion planning using hierarchical aggregation of workspace obstacles},
author={Ghosh, Mukulika and Thomas, Shawna and Morales, Marco and Rodriguez, Sam and Amato, Nancy M},
booktitle={2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={5716--5721},
year={2016},
organization={IEEE}
}
Abstract
Sampling-based motion planning is the state-of-the-art technique for solving challenging motion planning problems in a wide variety of domains. While generally successful, their performance suffers from increasing problem complexity. In many cases, the full problem complexity is not needed for the entire solution. We present a hierarchical aggregation framework that groups and models sets of obstacles based on the currently needed level of detail. The hierarchy enables sampling to be performed using the simplest and most conservative representation of the environment possible in that region. Our results show that this scheme improves planner performance irrespective of the underlying sampling method and input problem. In many cases, improvement is significant, with running times often less than 60% of the original planning time.
The Impact of Approximate Methods on Local Learning in Motion Planning, Diane Uwacu, Chinwe Ekenna, Shawna Thomas, Nancy Amato, 1st International Workshop on Robot Learning and Planning (RLP 2016), in conjunction with RSS 2016, pp. 38-44, Ann Arbor, MI, Jun 2016.
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [ArXiv] [Manuscript]
BibTex
@inproceedings{uwacu-wrlp-2016
, author = "Diane Uwacu and Chinwe Ekenna and Shawna Thomas and Nancy M. Amato"
, title = "The Impact of Approximate Methods on Local Learning in Motion Planning"
, booktitle = "1st International Workshop on Robot Learning and Planning (RLP 2016), in conjunction with RSS 2016"
, month = "June"
, year = "2016"
, note = "http://chitsazlab.org/robotics/rlp2016/RLP_2016_paper_11.html"
}
Abstract
Machine learning methods have been applied to many motion planning algorithms including probabilistic roadmap methods (PRM). There are many variants of these methods and choosing the best one every time is hard and depends on local properties of the environment. A successful learning approach has been developed to offset this issue. This learning approach was applied to PRMs to help decide intelligently what method to utilize in dynamically created local regions of the environment or task space. It used exact neighbor finding approaches and removed the need to partition environments to get improved results. In this work we make further advances by introducing approximate neighbor finder methods. It has been established that approximate neighbor finding methods are faster than exact methods, still work well in connecting nodes to edges in PRMs, and that connection is robust to noise. We study what happens when noise is introduced into learning by using approximate methods instead of already studied exact methods. We show that the impact of noise on learning depends on how much learning needs to take place given the topology of the environment. Our results demonstrate a correlation between heterogeneity and the need for learning over a local region.
Improved Roadmap Connection via Local Learning for Sampling Based Planners, Chinwe Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato, Proc. IEEE/RSJ Int. Conf. Intel. Rob. Syst. (IROS), pp. 3227-3234, Hamburg, Germany, Oct 2015. DOI: 10.1109/IROS.2015.7353825
Keywords: Machine Learning, Motion Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{7353825, author={C. {Ekenna} and D. {Uwacu} and S. {Thomas} and N. M. {Amato}}, booktitle={2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, title={Improved roadmap connection via local learning for sampling based planners}, year={2015}, volume={}, number={}, pages={3227-3234},}
Abstract
Probabilistic Roadmap Methods (PRMs) solve the motion planing problem by constructing a roadmap (or graph) that models the motion space when feasible local motions exist. PRMs and variants contain several phases during roadmap generation i.e., sampling, connection, and query. Some work has been done to apply machine learning to the connection phase to decide which variant to employ, but it uses a global learning approach that is inefficient in heterogeneous situations. We present an algorithm that instead uses local learning: it only considers the performance history in the vicinity of the current connection attempt and uses this information to select good candidates for connection. It thus removes any need to explicitly partition the environment which is burdensome and typically difficult to do. Our results show that our method learns and adapts in heterogeneous environments, including a KUKA youBot with a fixed and mobile base. It finds solution paths faster for single and multi-query scenarios and builds roadmaps with better coverage and connectivity given a fixed amount of time in a wide variety of input problems. In all cases, our method outperforms the previous adaptive connection method and is comparable or better than the best individual method.
Studying Learning Techniques in Different Phases of PRM Construction, Chinwe Ekenna, Diane Uwacu, Shawna Thomas, Nancy Amato, In Machine Learning in Planning and Control of Robot Motion Workshop (IROS-MLPC), Hamburg, Germany, Oct 2015. DOI: 10.1109/IROS.2015.7353825
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [Published]
BibTex
no bib for now.
Abstract
Probabilistic Roadmap Methods (PRMs) solve the motion planning problem in two phases by sampling free configurations and connecting them together to build a map that is used to find a valid path. Existing algorithms are highly sensitive to the topology of the problem, and their efficiency depends on applying them to a compatible problem. Reinforcement learning has been applied to motion planning and rewards the action performed by planners during either sampling or connection, but not both. Previous work computed a global reward and action scheme, which saw a setback when heterogeneous environments were concerned. Local learning (connection) was recently introduced to offset this weakness identified during global learning, and there was some improvement in planner performance. These different learning schemes (global and local) have shown strengths and weaknesses individually. In this paper, we investigate local learning for sampling. We study what type of learning to apply when, and how the two phases of PRM roadmap construction interact, which has not been investigated before. We show the performance using each scheme on a KUKAyouBot, an 8 degree of freedom robot, and analyze what happens when they are all combined during roadmap construction
MARRT: Medial Axis Biased Rapidly-Exploring Random Trees, Jory Denny, Evan Greco, Shawna L. Thomas, Nancy M. Amato, 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 90-97, Hong Kong, China, Jun 2014. DOI: 10.1109/ICRA.2014.6906594
Keywords: Motion Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{6906594, author={J. {Denny} and E. {Greco} and S. {Thomas} and N. M. {Amato}}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA)}, title={MARRT: Medial Axis biased rapidly-exploring random trees}, year={2014}, volume={}, number={}, pages={90-97}, doi={10.1109/ICRA.2014.6906594}}
Abstract
Motion planning is a difficult and widely studied problem in robotics. Current research aims not only to find feasible paths, but to ensure paths have certain properties, e.g., shortest or safest paths. This is difficult for current state-of-the-art sampling-based techniques as they typically focus on simply finding any path. Despite this difficulty, sampling-based techniques have shown great success in planning for a wide range of applications. Among such planners, Rapidly-Exploring Random Trees (RRTs) search the planning space by biasing exploration toward unexplored regions. This paper introduces a novel RRT variant, Medial Axis RRT (MARRT), which biases tree exploration to the medial axis of free space by pushing all configurations from expansion steps towards the medial axis. We prove that this biasing increases the tree's clearance from obstacles. Improving obstacle clearance is useful where path safety is important, e.g., path planning for robots performing tasks in close proximity to the elderly. Finally, we experimentally analyze MARRT, emphasizing its ability to effectively map difficult passages while increasing obstacle clearance, and compare it to contemporary RRT techniques.
UMAPRM: Uniformly Sampling the Medial Axis, Hsin-Yi (Cindy) Yeh, Jory Denny, Aaron Lindsey, Shawna L. Thomas, Nancy M. Amato, 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 5798 -5803, Hong Kong, China, Jun 2014. DOI: 10.1109/ICRA.2014.6907711
Keywords: Motion Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{6907711, author={H. C. {Yeh} and J. {Denny} and A. {Lindsey} and S. {Thomas} and N. M. {Amato}}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA)}, title={UMAPRM: Uniformly sampling the medial axis}, year={2014}, volume={}, number={}, pages={5798-5803}, doi={10.1109/ICRA.2014.6907711}}
Abstract
Maintaining clearance, or distance from obstacles, is a vital component of successful motion planning algorithms. Maintaining high clearance often creates safer paths for robots. Contemporary sampling-based planning algorithms that utilize the medial axis, or the set of all points equidistant to two or more obstacles, produce higher clearance paths. However, they are biased heavily toward certain portions of the medial axis, sometimes ignoring parts critical to planning, e.g., specific types of narrow passages. We introduce Uniform Medial Axis Probabilistic RoadMap (UMAPRM), a novel planning variant that generates samples uniformly on the medial axis of the free portion of C space . We theoretically analyze the distribution generated by UMAPRM and show its uniformity. Our results show that UMAPRM's distribution of samples along the medial axis is not only uniform but also preferable to other medial axis samplers in certain planning problems. We demonstrate that UMAPRM has negligible computational overhead over other sampling techniques and can solve problems the others could not, e.g., a bug trap. Finally, we demonstrate UMAPRM successfully generates higher clearance paths in the examples.
Adapting RRT Growth for Heterogeneous Environments, Jory Denny, Marco Morales, Samuel Rodriguez, Nancy M. Amato, In. Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, Nov 2013. DOI: 10.1109/IROS.2013.6696589
Keywords: Adaptive Algorithm, Rapidly-exploring Random Tree (RRT), Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{6696589, author={J. {Denny} and M. {Morales} and S. {Rodriguez} and N. M. {Amato}}, booktitle={2013 IEEE/RSJ International Conference on Intelligent Robots and Systems}, title={Adapting RRT growth for heterogeneous environments}, year={2013}, volume={}, number={}, pages={1772-1778}, doi={10.1109/IROS.2013.6696589}}
Abstract
Rapidly-exploring Random Trees (RRTs) are effective for a wide range of applications ranging from kinodynamic planning to motion planning under uncertainty. However, RRTs are not as efficient when exploring heterogeneous environments and do not adapt to the space. For example, in difficult areas an expensive RRT growth method might be appropriate, while in open areas inexpensive growth methods should be chosen. In this paper, we present a novel algorithm, Adaptive RRT, that adapts RRT growth to the current exploration area using a two level growth selection mechanism. At the first level, we select groups of expansion methods according to the visibility of the node being expanded. Second, we use a cost-sensitive learning approach to select a sampler from the group of expansion methods chosen. Also, we propose a novel definition of visibility for RRT nodes which can be computed in an online manner and used by Adaptive RRT to select an appropriate expansion method. We present the algorithm and experimental analysis on a broad range of problems showing not only its adaptability, but efficiency gains achieved by adapting exploration methods appropriately.
UOBPRM: A uniformly distributed obstacle-based PRM, Hsin-Yi Yeh, Shawna Thomas, David Eppstein, Nancy M. Amato, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2655-2662, Oct 2012. DOI: 10.1109/IROS.2012.6385875
Keywords: obstacle-based, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{6385875,
author={Yeh, Hsin-Yi and Thomas, Shawna and Eppstein, David and Amato, Nancy M.},
booktitle={2012 IEEE/RSJ International Conference on Intelligent Robots and Systems},
title={UOBPRM: A uniformly distributed obstacle-based PRM},
year={2012},
volume={},
number={},
pages={2655-2662},
doi={10.1109/IROS.2012.6385875}}
Abstract
This paper presents a new sampling method for motion planning that can generate configurations more uniformly distributed on C-obstacle surfaces than prior approaches. Here, roadmap nodes are generated from the intersections between C-obstacles and a set of uniformly distributed fixed-length segments in C-space. The results show that this new sampling method yields samples that are more uniformly distributed than previous obstacle-based methods such as OBPRM, Gaussian sampling, and Bridge test sampling. UOBPRM is shown to have nodes more uniformly distributed near C-obstacle surfaces and also requires the fewest nodes and edges to solve challenging motion planning problems with varying narrow passages.
RESAMPL: A Region-Sensitive Adaptive Motion Planner, Samuel Rodriguez, Shawna Thomas, Roger Pearce, Nancy M. Amato, Algorithmic Foundation of Robotics VII , pp. 285-300, N/A, Jan 2008. DOI: 10.1007/978-3-540-68405-3_18
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@Inbook{Rodriguez2008,
author="Rodriguez, Samuel
and Thomas, Shawna
and Pearce, Roger
and Amato, Nancy M.",
editor="Akella, Srinivas
and Amato, Nancy M.
and Huang, Wesley H.
and Mishra, Bud",
title="RESAMPL: A Region-Sensitive Adaptive Motion Planner",
bookTitle="Algorithmic Foundation of Robotics VII: Selected Contributions of the Seventh International Workshop on the Algorithmic Foundations of Robotics",
year="2008",
publisher="Springer Berlin Heidelberg",
address="Berlin, Heidelberg",
pages="285--300",
isbn="978-3-540-68405-3",
doi="10.1007/978-3-540-68405-3_18",
url="https://doi.org/10.1007/978-3-540-68405-3_18"
}
Abstract
Automatic motion planning has applications ranging from traditional robotics to computer-aided design to computational biology and chemistry. While randomized planners, such as probabilistic roadmap methods (PRMs) or rapidly-exploring random trees (RRT), have been highly successful in solving many high degree of freedom problems, there are still many scenarios in which we need better methods, e.g., problems involving narrow passages or which contain multiple regions that are best suited to different planners.
In this work, we present RESAMPL, a motion planning strategy that uses local region information to make intelligent decisions about how and where to sample, which samples to connect together, and to find paths through the environment. Briefly, RESAMPL classifies regions based on the entropy of the samples in it, and then uses these classifications to further refine the sampling. Regions are placed in a region graph that encodes relationships between regions, e.g., edges correspond to overlapping regions. The strategy for connecting samples is guided by the region graph, and can be exploited in both multi-query and single-query scenarios. Our experimental results comparing RESAMPL to previous multi-query and single-query methods show that RESAMPL is generally significantly faster and also usually requires fewer samples to solve the problem.
Analysis of the Evolution of C-Space Models Built through Incremental Exploration, Marco Morales, Roger Pearce, Nancy M. Amato, in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp. 1029-1034, Rome, Italy, Apr 2007. DOI: 10.1109/ROBOT.2007.363120
Keywords: Mobile Robots, Motion Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{4209224,
author={Morales, Marco and Pearce, Roger and Amato, Nancy M.},
booktitle={Proceedings 2007 IEEE International Conference on Robotics and Automation},
title={Analysis of the Evolution of C-Space Models built through Incremental Exploration},
year={2007},
volume={},
number={},
pages={1029-1034},
doi={10.1109/ROBOT.2007.363120}}
Abstract
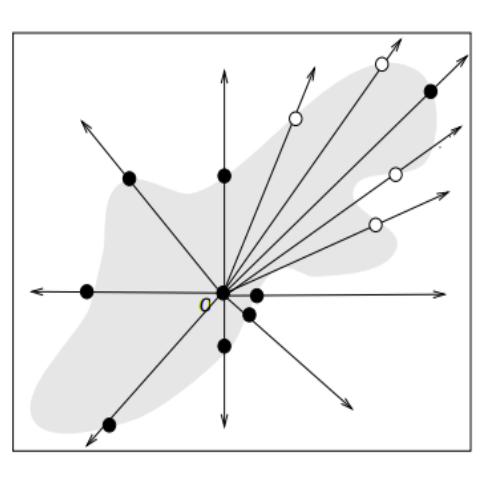
Many sampling methods for motion planning explore the robot's configuration space (C-space) starting from a set of configuration(s) and incrementally explore surrounding areas to produce a growing model of the space. Although there is a common understanding of the strengths and weaknesses of these techniques, metrics for analyzing the incremental exploration process and for evaluating the performance of incremental samplers have been lacking. We propose the use of local metrics that provide insight into the complexity of the different regions in the model and global metrics that describe the process as a whole. These metrics only require local information and can be efficiently computed. We illustrate the use of our proposed metrics to analyze representative incremental strategies including the rapidly-exploring random trees, expansive space trees, and the original randomized path planner. We show how these metrics model the efficiency of C-space exploration and help to identify different modeling stages. In addition, these metrics are ideal for adapting space exploration to improve performance.
Metrics for Analyzing the Evolution of C-Space Models, Marco A. Morales, Roger Pearce, Nancy M. Amato, in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp. 1268-1273, Orlando, Florida, USA, May 2006. DOI: 10.1109/ROBOT.2006.1641883
Keywords: Algorithms, Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{1641883,
author={Morales A, M.A. and Pearce, R. and Amato, N.M.},
booktitle={Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006.},
title={Metrics for analyzing the evolution of C-space models},
year={2006},
volume={},
number={},
pages={1268-1273},
doi={10.1109/ROBOT.2006.1641883}}
Abstract
There are many sampling-based motion planning methods that model the connectivity of a robot's configuration space (C-space) with a graph whose nodes are valid configurations and whose edges represent valid transitions between nodes. One of the biggest challenges faced by users of these methods is selecting the right planner for their problem. While researchers have tried to compare different planners, most accepted metrics for comparing planners are based on efficiency, e.g., number of collision detection calls or samples needed to solve a particular set of queries, and there is still a lack of useful and efficient quantitative metrics that can be used to measure the suitability of a planner for solving a problem. That is, although there is great interest in determining which planners should be used in which situations, there are still many questions we cannot answer about the relative performance of different planning methods. In this paper we make some progress towards this goal. We propose a metric that can be applied to each new sample considered by a sampling-based planner to characterize how that sample improves, or not, the planner's current C-space model. This characterization requires only local information and can be computed quite efficiently, so that it can be applied to every sample. We show how this characterization can be used to analyze and compare how different planning strategies explore the configuration space. In particular, we show that it can be used to identify three phases that planners go through when building C-space models: quick learning (rapidly building a coarse model), model enhancement (refining the model), and learning decay (oversampling - most samples do not provide additional information). Hence, our work can also provide the basis for determining when a particular planning strategy has 'converged' on the best C-space model that it is capable of building.
An Obstacle-Based Rapidly-Exploring Random Tree, Samuel Rodriguez, Xinyu Tang, Jyh-Ming Lien, Nancy M. Amato, In Proc. IEEE International Conference on Robotics and Automation (ICRA), Orlando, Florida, USA, May 2006. DOI: 10.1109/ROBOT.2006.1641823
Keywords: obstacle-based, Rapidly-exploring Random Tree (RRT), Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{1641823, author={ {Rodriguez} and {Xinyu Tang} and {Jyh-Ming Lien} and N. M. {Amato}}, booktitle={Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006.}, title={An obstacle-based rapidly-exploring random tree}, year={2006}, volume={}, number={}, pages={895-900}, doi={10.1109/ROBOT.2006.1641823}}
Abstract
Tree-based path planners have been shown to be well suited to solve various high dimensional motion planning problems. Here we present a variant of the Rapidly-Exploring Random Tree (RRT) path planning algorithm that is able to explore narrow passages or difficult areas more effectively. We show that both workspace obstacle information and C-space information can be used when deciding which direction to grow. The method includes many ways to grow the tree, some taking into account the obstacles in the environment. This planner works best in difficult areas when planning for free flying rigid or articulated robots. Indeed, whereas the standard RRT can face difficulties planning in a narrow passage, the tree based planner presented here works best in these areas
Iterative Relaxation of Constraints: A Framework for Improving Automated Motion Planning, O. Burchan Bayazit, Dawen Xie, Nancy M. Amato, In Proc. IEEE Int. Conf. Intel. Rob. Syst. (IROS), pp. 586-593, Edmonton, Alberta, Canada, Aug 2005. DOI: 10.1109/IROS.2005.1545045
Keywords: Computational Biology, Sampling-Based Motion Planning, Virtual Reality
Links : [Published]
BibTex
@INPROCEEDINGS{1545045,
author={O. B. {Bayazit} and {Dawen Xie} and N. M. {Amato}},
booktitle={2005 IEEE/RSJ International Conference on Intelligent Robots and Systems}, title={Iterative relaxation of constraints: a framework for improving automated motion planning},
year={2005},
volume={},
number={},
pages={3433-3440},
doi={10.1109/IROS.2005.1545045}}
Abstract
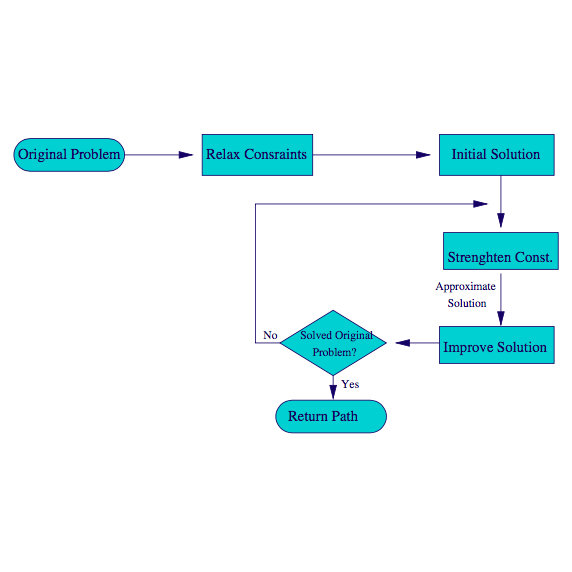
This paper presents a technique for improving the efficiency of automated motion planners. Motion planning has application in many areas such as robotics, virtual reality systems, computer-aided design, and even computational biology. Although there have been steady advances in motion planning algorithms, especially in randomized approaches such as probabilistic roadmap methods (PRMs) or rapidly-exploring random trees (RRTs), there are still some classes of problems that cannot be solved efficiently using these state-of-the-art motion planners. In this paper, we suggest an iterative strategy addressing this problem where we first simplify the problem by relaxing some feasibility constraints, solve the easier version of the problem, and then use that solution to help us find a solution for the harder problem. We show how this strategy can be applied to rigid bodies and to linkages with high degrees of freedom, including both open and closed chain systems. Experimental results are presented for linkages composed of 9-98 links. Although we use PRMs as the automated planner, the framework is general and can be applied with other motion planning techniques as well.
C-Space Subdivision and Integration in Feature-Sensitive Motion Planning, Marco A. Morales A., Lydia Tapia, Roger Pearce, Samuel Rodriguez, Nancy M. Amato, In Proc. IEEE International Conference on Robotics and Automation (ICRA), pp. 3114-3119, Barcelona, Spain, Apr 2005. DOI: 10.1109/ROBOT.2005.1570589
Keywords: Machine Learning, Motion Planning, Sampling-Based Motion Planning
Links : [Published] [Manuscript]
BibTex
@INPROCEEDINGS{1570589,
author={M. A. {Morales A.} and L. {Tapia} and R. {Pearce} and S. {Rodriguez} and N. M. {Amato}},
booktitle={Proceedings of the 2005 IEEE International Conference on Robotics and Automation},
title={C-space Subdivision and Integration in Feature-Sensitive Motion Planning},
year={2005},
volume={},
number={},
pages={3114-3119},
doi={10.1109/ROBOT.2005.1570589}}
Abstract
There are many randomized motion planning techniques, but it is often difficult to determine what planning method to apply to best solve a problem. Planners have their own strengths and weaknesses, and each one is best suited to a specific type of problem. In previous work, we proposed a meta-planner that, through analysis of the problem features, subdivides the instance into regions and determines which planner to apply in each region. The results obtained with our prototype system were very promising even though it utilized simplistic strategies for all components. Even so, we did determine that strategies for problem subdivision and for combination of partial regional solutions have a crucial impact on performance. In this paper, we propose new methods for these steps to improve the performance of the meta-planner. For problem subdivision, we propose two new methods: a method based on ÃÂÃÂÃÂâÃÂÃÂÃÂÃÂÃÂÃÂÃÂàgapsÃÂÃÂÃÂâÃÂÃÂÃÂÃÂÃÂÃÂÃÂàand a method based on information theory. For combining partial solutions, we propose two new methods that concentrate on neighboring areas of the regional solutions. We present results that show the performance gain achieved by utilizing these new strategies.
A Machine Learning Approach for Feature-Sensitive Motion Planning, Marco Morales, Lydia Tapia, Roger Pearce, Samuel Rodriguez, Nancy M. Amato, In Proc. Int. Wkshp. on Alg. Found. of Rob. (WAFR), pp. 361-376, Utrecht/Zeist, The Netherlands, Jul 2004. DOI: 10.1007/10991541_25
Keywords: Machine Learning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{10.1007/10991541_25,
author={Marco {Morales}, Lydia {Tapia}, Roger {Pearce}, Samuel {Rodriguez}, Nancy M. {Amato}},
booktitle={In Proc. Int. Wkshp. on Alg. Found. of Rob. (WAFR)},
title={A Machine Learning Approach for Feature-Sensitive Motion Planning},
year={2004},
volume={}, number={}, pages={361--376},
doi={10.1007/10991541_25}
}
Abstract
Although there are many motion planning techniques, there is no method that outperforms all others for all problem instances. Rather, each technique has different strengths and weaknesses which makes it best-suited for certain types of problems. Moreover, since an environment can contain vastly different regions, there may not be a single planner that will perform well in all its regions. Ideally, one would use a suite of planners in concert and would solve the problem by applying the best-suited planner in each region. In this paper, we propose an automated framework for feature-sensitive motion planning. We use a machine learning approach to characterize and partition C-space into regions that are well suited to one of the methods in our library of roadmap-based motion planners. After the best-suited method is applied in each region, the resulting region roadmaps are combined to form a roadmap of the entire planning space. Over a range of problems, we demonstrate that our simple prototype system reliably outperforms any of the planners on their own.
A general framework for sampling on the medial axis of the free space, Jyh-Ming Lien, Shawna L. Thomas, Nancy M. Amato, In Proc. IEEE Int. Conf. Robot. Autom. (ICRA), Vol: 3, pp. 4439-4444, Taipei, Taiwan, Sep 2003. DOI: 10.1109/ROBOT.2003.1242288
Keywords: Medial Axis, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{1242288,
author={ {Jyh-Ming Lien} and S. L. {Thomas} and N. M. {Amato}},
booktitle={2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422)}, title={A general framework for sampling on the medial axis of the free space},
year={2003},
volume={3},
number={},
pages={4439-4444 vol.3},
doi={10.1109/ROBOT.2003.1242288}}
Abstract
We propose a general framework for sampling the configuration space in which randomly generated configurations, free or not, are retracted onto the medial axis of the free space. Generalizing our previous work, this framework provides a template encompassing all possible retraction approaches. It also removes the requirement of exactly computing distance metrics thereby enabling application to more realistic high dimensional problems. In particular, our framework supports methods that retract a given configuration exactly or approximately onto the medial axis. As in our previous work, exact methods provide fast and accurate retraction in low (2 or 3) dimensional space. We also propose new approximate methods that can be applied to high dimensional problems, such as many DOF articulated robots. Theoretical and experimental results show improved performance on problems requiring traversal of narrow passages. We also study tradeoffs between accuracy and efficiency for different levels of approximation, and how the level of approximation effects the quality of the resulting roadmap.
Customizing PRM Roadmaps at Query Time, Guang Song, S. Miller, N.M. Amato, In Proc. IEEE International Conference on Robotics and Automation (ICRA), Seoul, South Korea, May 2001. DOI: 10.1109/ROBOT.2001.932823
Keywords: Query Customization, Sampling-Based Motion Planning
Links : [Published]
BibTex
@inproceedings{song2001customizing,
title={Customizing PRM roadmaps at query time},
author={Song, Guang and Miller, Shawna and Amato, Nancy M},
booktitle={Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164)},
volume={2},
pages={1500--1505},
year={2001},
organization={IEEE}
}
Abstract
We propose an approach for building and querying probabilistic roadmaps. In the roadmap construction stage, we build coarse roadmaps by performing only an approximate validation of the roadmap nodes and/or edges. In the query stage, the roadmap is validated and refined only in the area of interest for the query, and moreover is customized in accordance with any specified query preferences. This approach, which postpones some of the validation checks (e.g., collision checks) to the query phase, yields more efficient solutions to many problems. An important benefit of our approach is that it gives one the ability to customize the same roadmap in accordance with multiple, variable, query preferences. For example our approach enables one to find a path which maintains a particular clearance, or makes at most some specified number of sharp turns. Our preliminary results on problems drawn from diverse application domains show that this new approach dramatically improves performance, and shows remarkable flexibility when adapting to different query requirements.
Enhancing Randomized Motion Planners: Exploring with Haptic Hints, O. Burçhan Bayazit, Guang Song, Nancy M. Amato , Autonomous Robots, Vol: 10, Issue: 2, pp. 163-174, Mar 2001. DOI: 10.1023/A:1008981903273
Keywords: Motion Planning, Sampling-Based Motion Planning
Links : [Published]
BibTex
@article{bayazit2001enhancing,
title={Enhancing randomized motion planners: Exploring with haptic hints},
author={Bayazit, O Burchan and Song, Guang and Amato, Nancy M},
journal={Autonomous Robots},
volume={10},
number={2},
pages={163--174},
year={2001},
publisher={Springer}
}
Abstract
In this paper, we investigate methods for enabling a human operator and an automatic motion planner to cooperatively solve a motion planning query. Our work is motivated by our experience that automatic motion planners sometimes fail due to the difficulty of discovering âÃÂÃÂcriticalâÃÂàconfigurations of the robot that are often naturally apparent to a human observer.
Our goal is to develop techniques by which the automatic planner can utilize (easily generated) user-input, and determine âÃÂÃÂnaturalâÃÂàways to inform the user of the progress made by the motion planner. We show that simple randomized techniques inspired by probabilistic roadmap methods are quite useful for transforming approximate, user-generated paths into collision-free paths, and describe an iterative transformation method which enables one to transform a solution for an easier version of the problem into a solution for the original problem. We also illustrate that simple visualization techniques can provide meaningful representations of the planner's progress in a 6-dimensional C-space. We illustrate the utility of our methods on difficult problems involving complex 3D CAD Models.
Ligand Binding with OBPRM and Haptic User Input: Enhancing Automatic Motion Planning with Virtual Touch, O. Burchan Bayazit , Guang Song , Nancy M. Amato , ACM Digital Library, College Station, Texas, USA, Oct 2000.
Keywords: Ligand Binding, Sampling-Based Motion Planning
Links : [Published]
BibTex
@MISC{Bayazit00ligandbinding,
author = {O. Burchan Bayazit and Guang Song and Nancy M. Amato},
title = {Ligand Binding with OBPRM and Haptic User Input: Enhancing Automatic Motion Planning with Virtual Touch},
year = {2000}
}
Abstract
In this paper, we present a framework for studying ligand binding which is based on techniques recently developed in the robotics motion planning community. We are especially interested in locating binding sites on the protein for a ligand molecule. Our work investigates the performance of a fully automated motion planner, as well improvements obtained when supplementary user input is collected using a haptic device. Our results applying an obstacle-based probabilistic roadmap motion planning algorithm (obprm) to some known protein-ligand pairs are very encouraging. In particular, we were able to automatically generate congurations close to, and correctly identify, the true binding site in the three protein-ligand complexes we tested. We nd that user input helps the planner, and a haptic device helps the user to understand the protein structure by enabling them to feel the forces which are hard to visualize.
MAPRM: A Probabilistic Roadmap Planner with Sampling on the Medial Axis of the Free Space, S. A. Wilmarth, N. M. Amato, P. F. Stiller, Proceedings of IEEE International Conference on Robotics and Automation, pp. 1024-1031, Detroit, MI, May 1999. DOI: 10.1109/ROBOT.1999.772448
Keywords: Medial Axis, Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{772448,
author={Wilmarth, S.A. and Amato, N.M. and Stiller, P.F.},
booktitle={Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C)},
title={MAPRM: a probabilistic roadmap planner with sampling on the medial axis of the free space},
year={1999},
volume={2},
number={},
pages={1024-1031 vol.2},
doi={10.1109/ROBOT.1999.772448}}
Abstract
Probabilistic roadmap planning methods have been shown to perform well in a number of practical situations, but their performance degrades when paths are required to pass through narrow passages in the free space. We propose a new method of sampling the configuration space in which randomly generated configurations, free or not, are retracted onto the medial axis of the free space. We give algorithms that perform this retraction while avoiding explicit computation of the medial axis, and we show that sampling and retracting in this manner increases the number of nodes found in small volume corridors in a way that is independent of the volume of the corridor and depends only on the characteristics of the obstacles bounding it. Theoretical and experimental results are given to show that this improves performance on problems requiring traversal of narrow passages.
A Randomized Roadmap Method for Path and Manipulation Planning, Nancy M. Amato, Yan Wu, Proceedings of IEEE International Conference on Robotics and Automation, Vol: 1, pp. 113-120, Minneapolis, MN, Apr 1996. DOI: 10.1109/ROBOT.1996.503582
Keywords: Sampling-Based Motion Planning
Links : [Published]
BibTex
@INPROCEEDINGS{503582,
author={Amato, N.M. and Wu, Y.},
booktitle={Proceedings of IEEE International Conference on Robotics and Automation},
title={A randomized roadmap method for path and manipulation planning},
year={1996},
volume={1},
number={},
pages={113-120 vol.1},
doi={10.1109/ROBOT.1996.503582}}
Abstract
This paper presents a new randomized roadmap method for motion planning for many DOF robots that can be used to obtain high quality roadmaps even when C-space is crowded. The main novelty in the authors' approach is that roadmap candidate points are chosen on C-obstacle surfaces. As a consequence, the roadmap is likely to contain difficult paths, such as those traversing long, narrow passages in C-space. The approach can be used for both collision-free path planning and for manipulation planning of contact tasks. Experimental results with a planar articulated 6 DOF robot show that, after preprocessing, difficult path planning operations can often be carried out in less than a second.