
Current Contributors: Courtney McBeth, Isaac Love, Stav Ashur, James Motes, Marco Morales, Nancy Amato
Related Projects: Robot Task and Motion Planning Computational Geometry Sampling-based Planning
Spatial Packaging of Interconnected
Components with Coupled Physical Interactions (SPI2) is an
interdisciplinary project with the purpose of pushing the cutting edge of
automated design tools. At its core, SPI2 problems involve the placement of
both components and required interconnects inside 3D geometry. Additionally,
these components and interconnects must obey some constraints. Possible physics
constraints could include temperature limits or maximum electromagnetic
interference. Additionally, the system must be possible to manufacture and
maintain, which places limits on how and where components and interconnects can
be placed. All of the constraints make finding solutions very difficult, but
worthwhile, as there are many applications of SPI2 design. Altogether, SPI2
design problems present a very challenging, multi-faceted problem with many
applications.
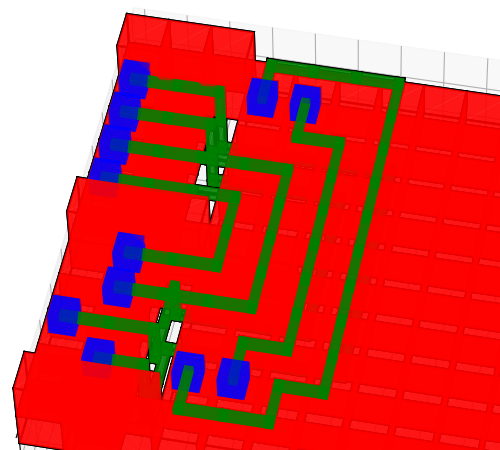
A key feature of SPI2 automated design tools is automated interconnect routing.
Interconnects, such as wires, pipes, air ducts, etc., play an important role in
any system, but also present a challenging problem in themselves. Paths for
interconnects must be volume disjoint, and may be subject to other
system constraints such as temperature, pressure, clearance, and repairability.
Space and complex geometry constraints also further complicate finding valid
paths for interconnects, as interconnects must often navigate through small,
complex spaces, such as between the components of a car engine, or through the
internals of a plane's airframe. Lastly, scale can play an important role as
well. Routing interconnects for a chemical plant presents a very different
problem than that of a car. Altogether, this makes finding paths for
interconnects a very challenging problem, but one for which sampling based
motion planning methods are well situated to solve.