 |
 |
|
Curriculum Vitae (CV) Google Scholar LinkedIn
I am a PhD student at the University of Illinois at Urbana-Champaign and work on multi-robot task and motion planning algorithms with Dr. Nancy Amato. I joined the Parasol Lab through the Distribute Research Experience for Undergraduates (DREU) Program in the summer of 2019. My work is funded by the NSF Graduate Research Fellowship Program (NSF GRFP).
My current research interests are in applying hybrid algorithms to multi-robot task and motion planning. Hybrid algorithms are a class of algorithms that decouple and couple certain areas of the search. Hybrid algorithms have been shown to solve the problem more efficiently than traditional coupled methods while mantaining completeness guarantees. My research involves applying hybrid algorithms to multi-robot task and motion planning applications such as precedence-constrained task allocation and pathfinding and task and motion planning in reconfigurable environments. We develop these algorithms in such a way that they lend themselves to be easily parallelizable.
Research
Parallel Hierarchical Composition Conflict-Based Search
Task and Motion Planning Conflict-Based Search
Multi-Agent Motion Planning
Integrated Task and Motion Planning
Parallel Methods
Publications
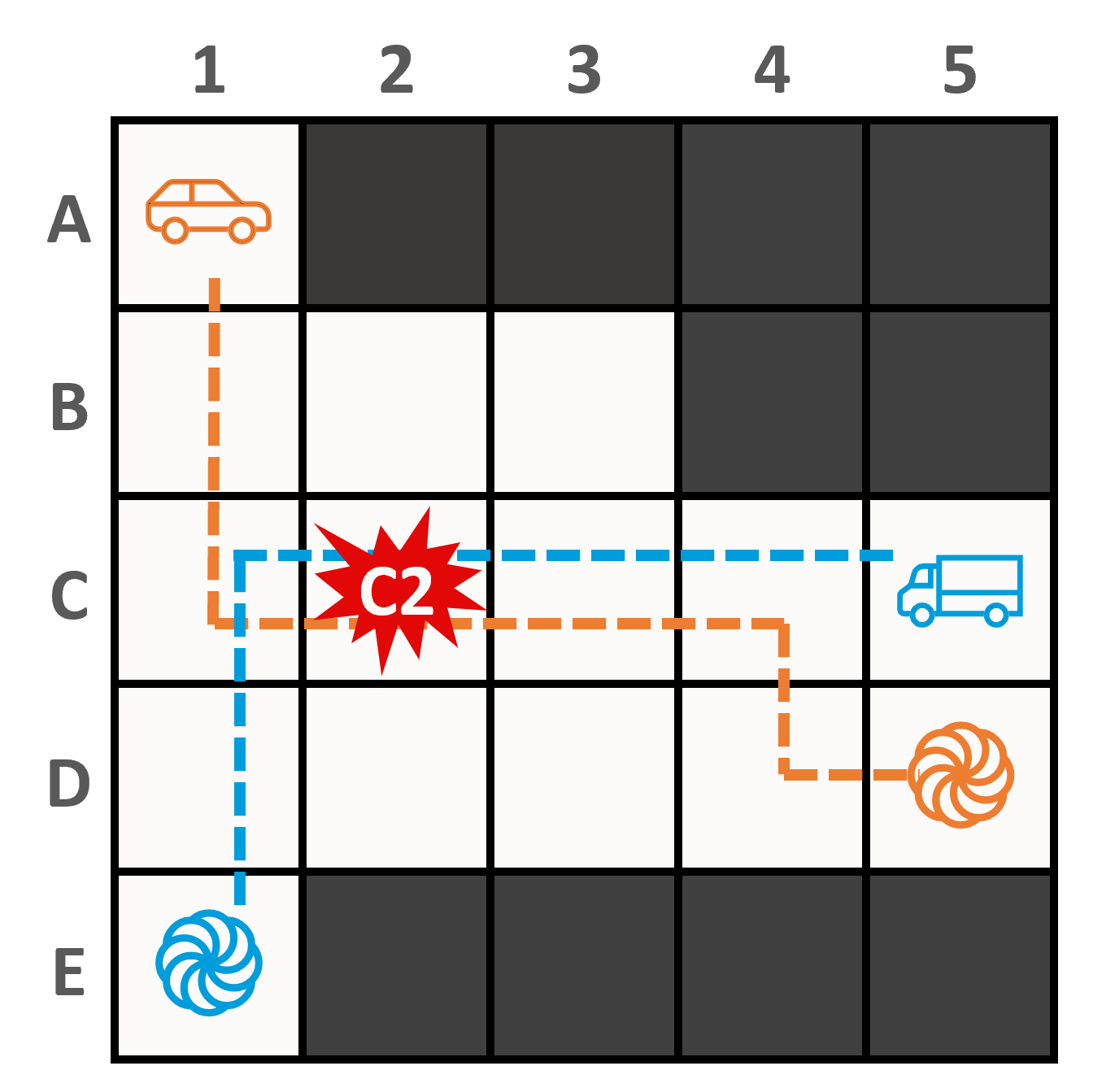
Parallel Hierarchical Composition Conflict-Based Search, Hannah Lee, James Motes, Marco Morales, Nancy M. Amato, IEEE/RSJ International Conference on Intelligent Robots and Systems, Vol: 6, Issue: 4, pp. 7001-7008, Prague, Czech Republic, Jul 2021. DOI: 10.1109/LRA.2021.3096476. @article{lee2021parallel, In this letter, we present the following optimal multi-agent pathfinding (MAPF) algorithms: Hierarchical Composition Conflict-Based Search, Parallel Hierarchical Composition Conflict-Based Search, and Dynamic Parallel Hierarchical Composition Conflict-Based Search. MAPF is the task of finding an optimal set of valid path plans for a set of agents such that no agents collide with present obstacles or each other. The presented algorithms are an extension of Conflict-Based Search (CBS), where the MAPF problem is solved by composing and merging smaller, more easily manageable subproblems. Using the information from these subproblems, the presented algorithms can more efficiently find an optimal solution. Our three presented algorithms demonstrate improved performance for optimally solving MAPF problems consisting of many agents in crowded areas while examining fewer states when compared with CBS and its variant Improved Conflict-Based Search.
Keywords: Multi-Agent, Parallel Planning, Path Planning
Links : [Published] BibTex
title={Parallel Hierarchical Composition Conflict-Based Search for Optimal Multi-Agent Pathfinding},
author={Lee, Hannah and Motes, James and Morales, Marco and Amato, Nancy M},
journal={IEEE Robotics and Automation Letters},
volume={6},
number={4},
pages={7001--7008},
year={2021},
publisher={IEEE}
}Abstract
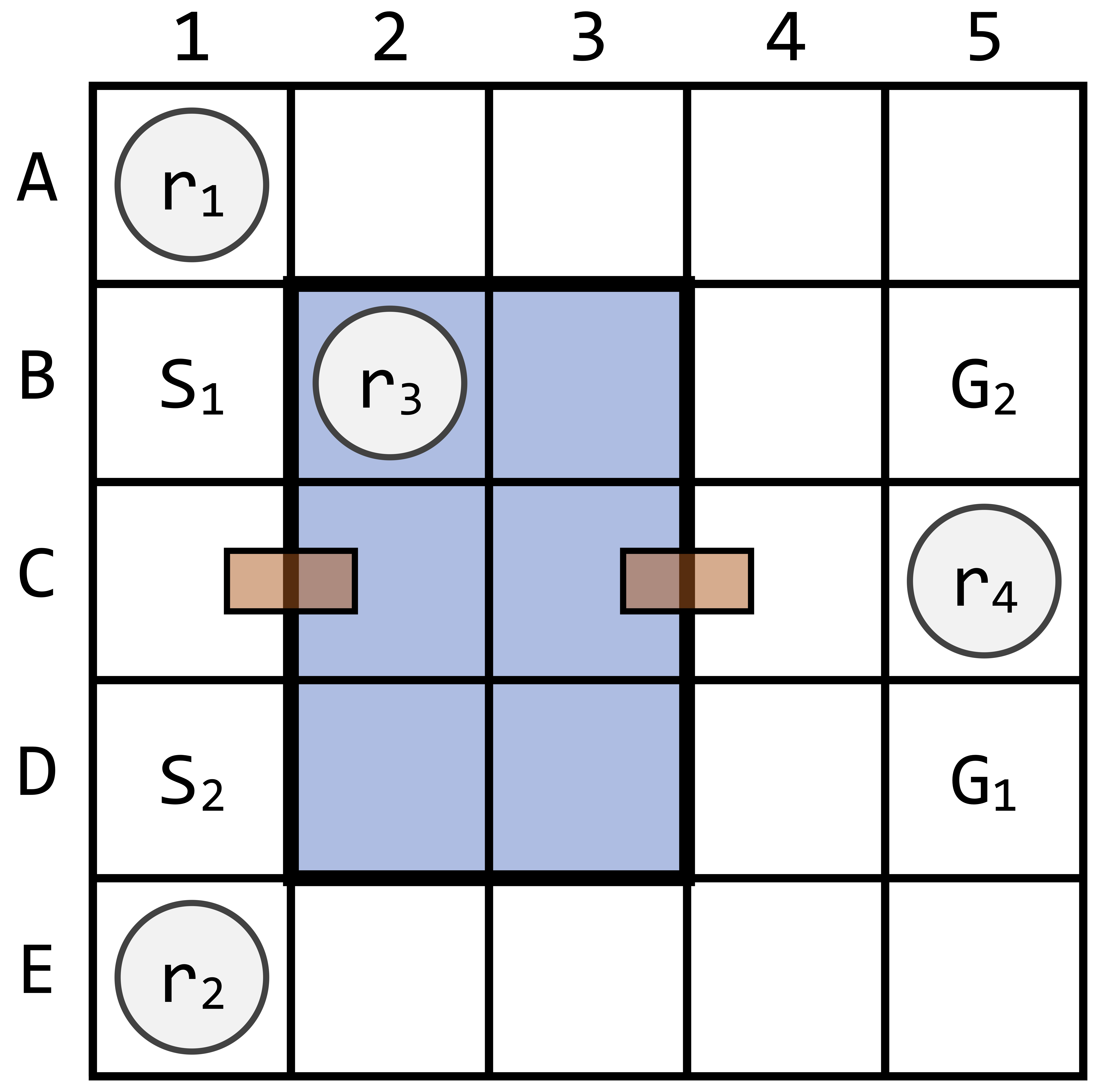
Multi-Robot Task and Motion Planning with Subtask Dependencies, James Motes, Read Sandstrom, Hannah Lee, Shawna Thomas, Nancy M. Amato, IEEE Robotics and Automation Letters (RA-L), Vol: 5, Issue: 2, pp. 3338-3345, Feb 2020. DOI: 10.1109/LRA.2020.2976329 @article{motes2020multi, We present a multi-robot integrated task and motion method capable of handling sequential subtask dependencies within multiply decomposable tasks. We map the multi-robot pathfinding method, Conflict Based Search, to task planning and integrate this with motion planning to create TMP-CBS. TMP-CBS couples task decomposition, allocation, and planning to support cases where the optimal solution depends on robot availability and inter-team conflict avoidance. We show improved planning time for simpler task sets and generate optimal solutions w.r.t. the state space representation for a broader range of problems than prior methods.
Keywords: Motion Planning, Multi-Agent, Task Planning
Links : [Published] BibTex
title={Multi-Robot Task and Motion Planning With Subtask Dependencies},
author={Motes, James and Sandstr{\"o}m, Read and Lee, Hannah and Thomas, Shawna and Amato, Nancy M},
journal={IEEE Robotics and Automation Letters},
volume={5},
number={2},
pages={3338--3345},
year={2020},
publisher={IEEE}
}Abstract