
Related Projects: Robot Task and Motion Planning Robot Interaction Task Allocation Our Algorithms At Work Assembly/Disassembly Sequencing General task planners deal with discrete sets of actions and cannot reason about geometric motions. Motion planners have no inherent semantics needed to define a higher-level notion of a task. The integration of task and motion planning provides a complementary solution to complex problems. We study this integration, particularly in multi-robot systems, and have developed algorithms for efficiently solving problems in this domain.

Robot Interaction
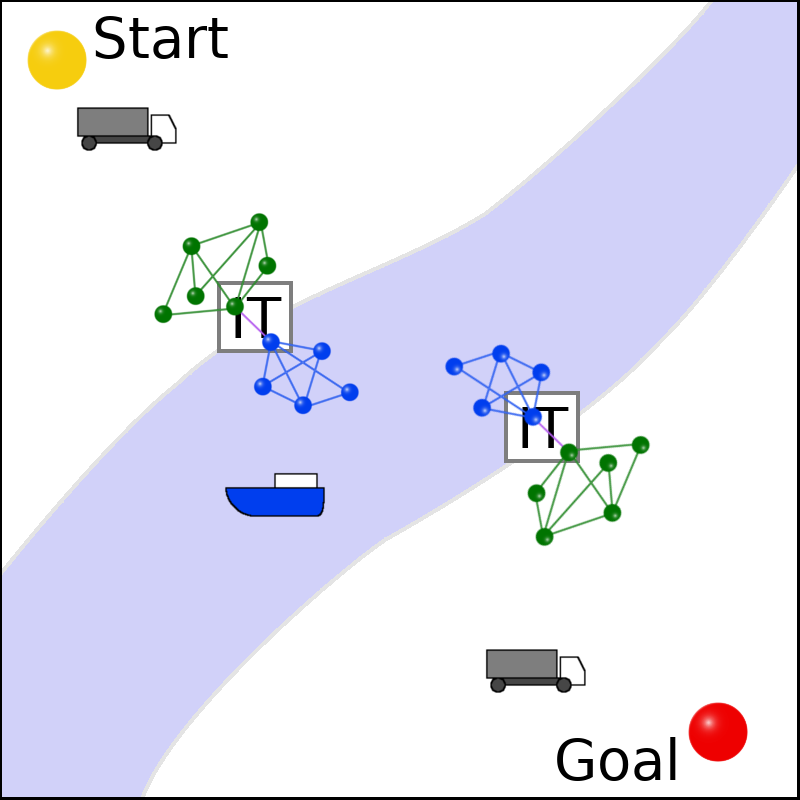
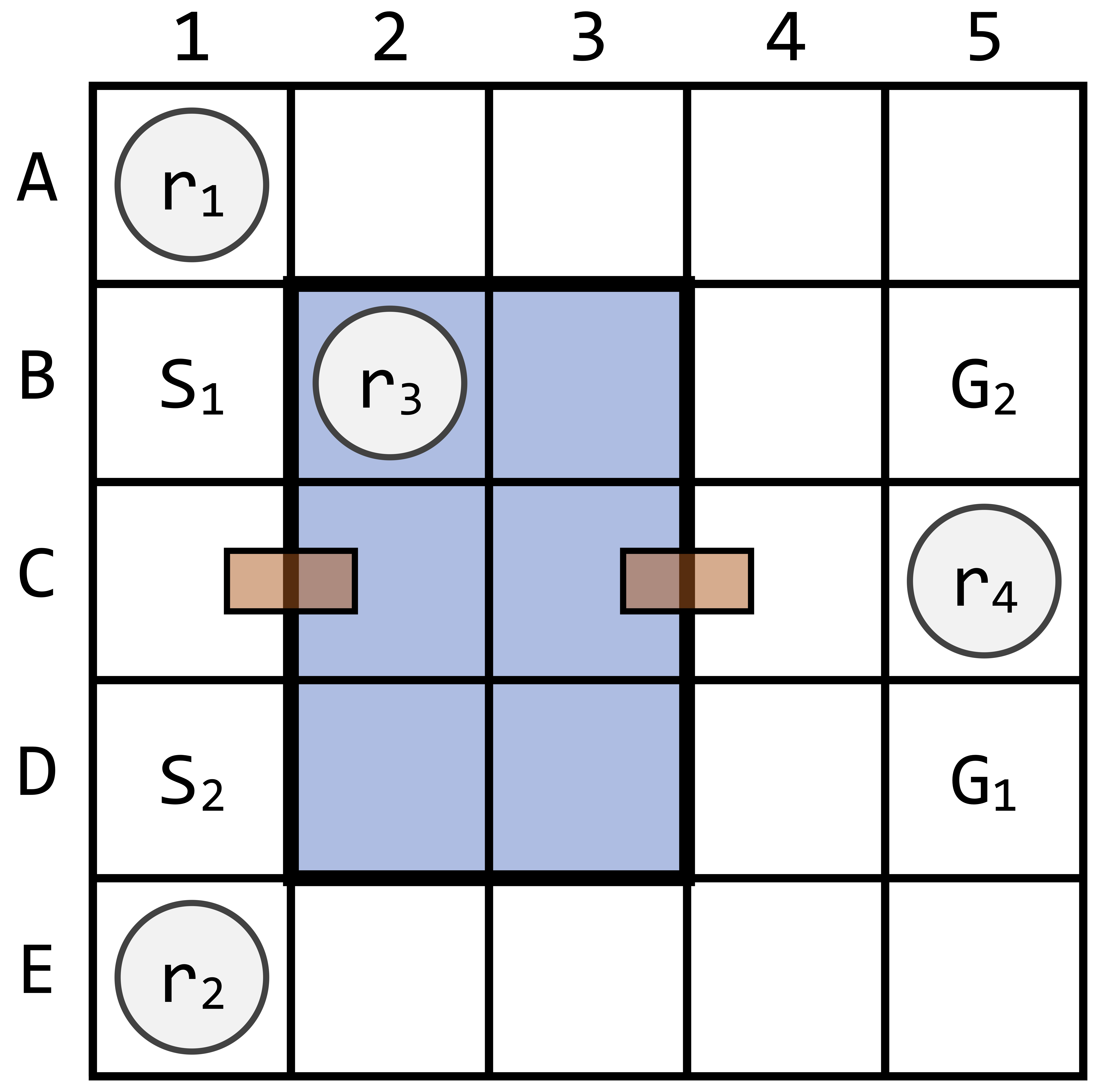
We efficiently plan when, where, and how to perform robot interactions in order to leverage the capabilities of robots in the system.
Task Allocation
Task allocation seeks a feasible set of assignments of tasks to robots.
Our Algorithms At Work
We apply our algorithms to multidisciplinary projects ranging from human-robot collaboration in the manufacturing industry, to assembly planning, to computational drug design!
Assembly/Disassembly Sequencing
(Dis)assembly sequence planning identifies physically viable plans to (dis)assemble an assembly of parts. It is also used in end-of-life product design to verify the future ability to disassemble the product for recycling or repairs.