
Collaborative Industrial Robots

Our group participates in two research projects aiming to integrate robots in industrial settings to perform various tasks.
Interconnect Routing
We find ways to compute paths for interconnects in complex systems.
Robots on the (Mobile) Edge and in the Hybrid Cloud
In this project with IBM, we are exploring how to rethink robot task and motion planning in environments with access to hybrid cloud and mobile edge resources.
Assembly/Disassembly Sequencing
(Dis)assembly sequence planning identifies physically viable plans to (dis)assemble an assembly of parts. It is also used in end-of-life product design to verify the future ability to disassemble the product for recycling or repairs.
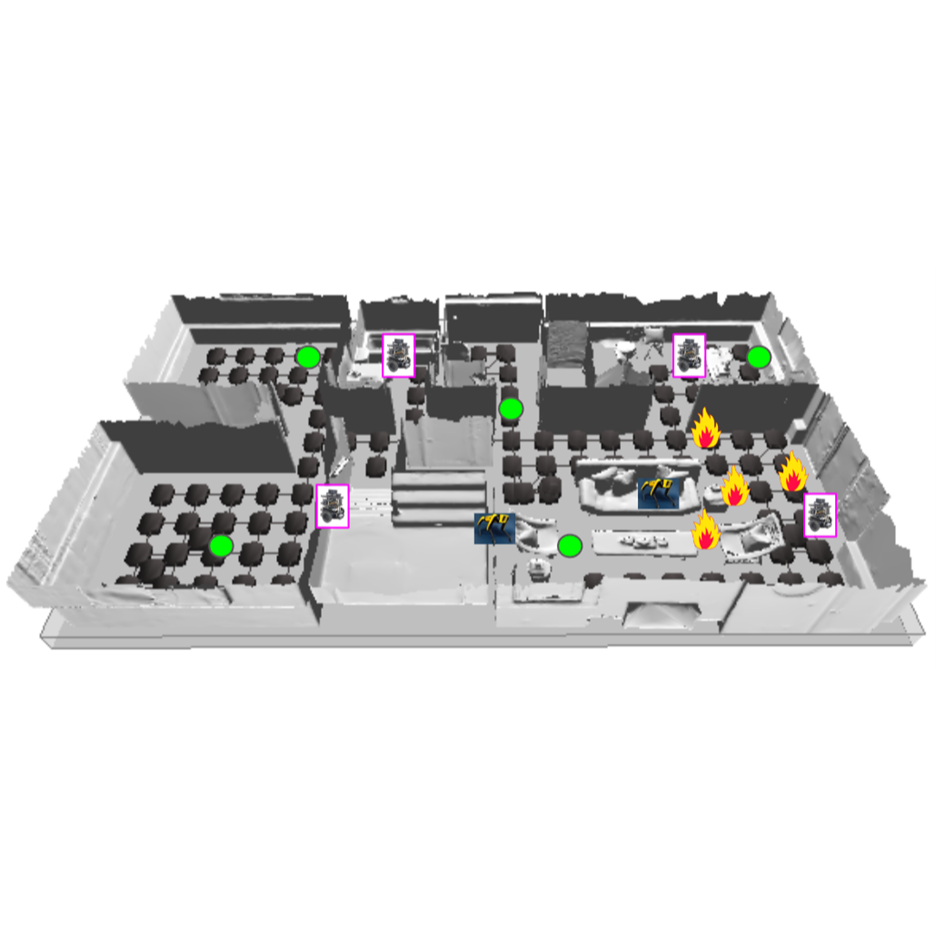
Navigation & Localization

We explore different tasks for mobile robots, such as navigation, localization and coverage
Computational Biology
Our group is investigating applications of sampling-based motion planning methods to protein folding, ligand binding (i.e., drug docking, which arises in drug design), RNA folding, and neuroscience.
Parasol Planning Library - PPL

GitHub repository for the Parasol Planning Library - PPL.
Motion Planning Benchmarks | Parasol Lab
A source of models useful for testing motion planning algorithms